#include <urdf_config.hpp>
Definition at line 46 of file urdf_config.hpp.
◆ URDFConfig()
| moveit_setup::URDFConfig::URDFConfig |
( |
| ) |
|
|
inline |
◆ collectDependencies()
| void moveit_setup::URDFConfig::collectDependencies |
( |
std::set< std::string > & |
| ) |
const |
|
overridevirtual |
◆ collectVariables()
| void moveit_setup::URDFConfig::collectVariables |
( |
std::vector< TemplateVariable > & |
| ) |
|
|
overridevirtual |
◆ getModel()
| const urdf::Model & moveit_setup::URDFConfig::getModel |
( |
| ) |
const |
|
inline |
◆ getModelPtr()
| const std::shared_ptr< urdf::Model > & moveit_setup::URDFConfig::getModelPtr |
( |
| ) |
const |
|
inline |
◆ getRobotName()
| std::string moveit_setup::URDFConfig::getRobotName |
( |
| ) |
const |
|
inline |
◆ getURDFContents()
| std::string moveit_setup::URDFConfig::getURDFContents |
( |
| ) |
const |
|
inline |
◆ getURDFPackageName()
| std::string moveit_setup::URDFConfig::getURDFPackageName |
( |
| ) |
const |
|
inline |
◆ getURDFPath()
| std::filesystem::path moveit_setup::URDFConfig::getURDFPath |
( |
| ) |
const |
|
inline |
◆ getXacroArgs()
| std::string moveit_setup::URDFConfig::getXacroArgs |
( |
| ) |
const |
|
inline |
◆ isConfigured()
| bool moveit_setup::URDFConfig::isConfigured |
( |
| ) |
const |
|
overridevirtual |
◆ isXacroFile()
| bool moveit_setup::URDFConfig::isXacroFile |
( |
| ) |
const |
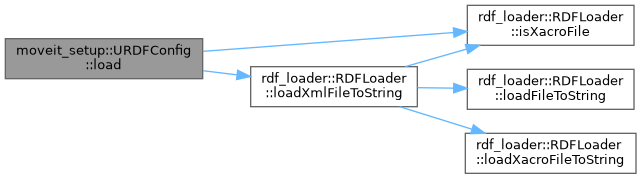
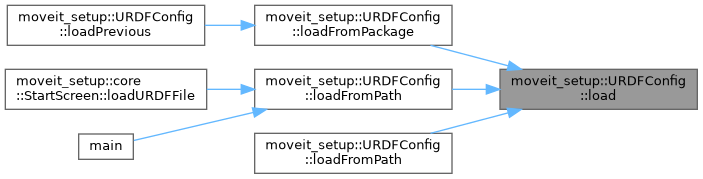
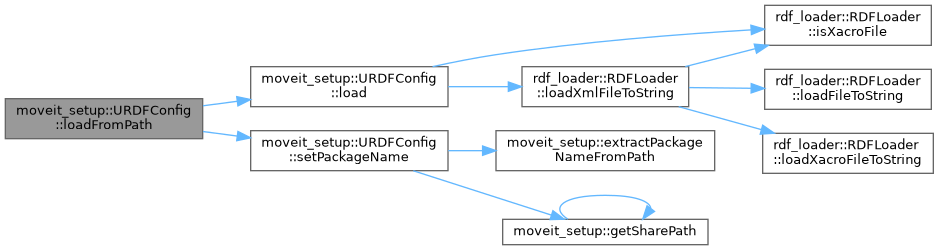
◆ load()
| void moveit_setup::URDFConfig::load |
( |
| ) |
|
|
protected |
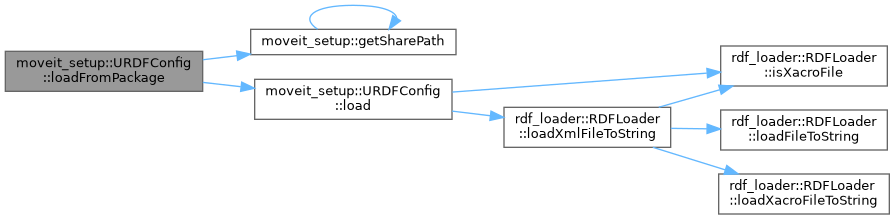
◆ loadFromPackage()
| void moveit_setup::URDFConfig::loadFromPackage |
( |
const std::filesystem::path & |
package_name, |
|
|
const std::filesystem::path & |
relative_path, |
|
|
const std::string & |
xacro_args = "" |
|
) |
| |
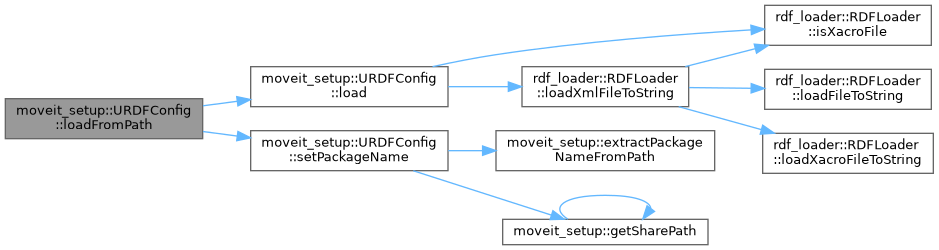
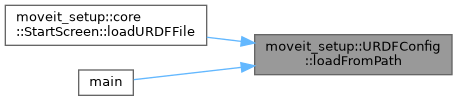
◆ loadFromPath() [1/2]
| void moveit_setup::URDFConfig::loadFromPath |
( |
const std::filesystem::path & |
urdf_file_path, |
|
|
const std::string & |
xacro_args = "" |
|
) |
| |
◆ loadFromPath() [2/2]
| void moveit_setup::URDFConfig::loadFromPath |
( |
const std::filesystem::path & |
urdf_file_path, |
|
|
const std::vector< std::string > & |
xacro_args |
|
) |
| |
◆ loadPrevious()
| void moveit_setup::URDFConfig::loadPrevious |
( |
const std::filesystem::path & |
, |
|
|
const YAML::Node & |
|
|
) |
| |
|
overridevirtual |
Loads the configuration from an existing MoveIt configuration.
The data can be loaded directly from files in the configuration via the package path.
Certain other pieces of "meta" information may be stored in the .setup_assistant yaml file in the root of the configuration. If there is a node in that file that matches this config's name, it is passed in as an argument.
- Parameters
-
| package_path | The path to the root folder of the configuration. |
Reimplemented from moveit_setup::SetupConfig.
Definition at line 47 of file urdf_config.cpp.
◆ onInit()
| void moveit_setup::URDFConfig::onInit |
( |
| ) |
|
|
overridevirtual |
◆ saveToYaml()
| YAML::Node moveit_setup::URDFConfig::saveToYaml |
( |
| ) |
const |
|
overridevirtual |
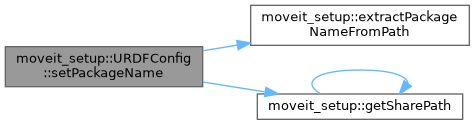
◆ setPackageName()
| void moveit_setup::URDFConfig::setPackageName |
( |
| ) |
|
|
protected |
◆ urdf_from_xacro_
| bool moveit_setup::URDFConfig::urdf_from_xacro_ |
|
protected |
Flag indicating whether the URDF was loaded from .xacro format.
Definition at line 122 of file urdf_config.hpp.
◆ urdf_model_
| std::shared_ptr<urdf::Model> moveit_setup::URDFConfig::urdf_model_ |
|
protected |
◆ urdf_path_
| std::filesystem::path moveit_setup::URDFConfig::urdf_path_ |
|
protected |
◆ urdf_pkg_name_
| std::string moveit_setup::URDFConfig::urdf_pkg_name_ |
|
protected |
Name of package containing urdf (note: this may be empty b/c user may not have urdf in pkg)
Definition at line 116 of file urdf_config.hpp.
◆ urdf_pkg_relative_path_
| std::filesystem::path moveit_setup::URDFConfig::urdf_pkg_relative_path_ |
|
protected |
Path relative to urdf package (note: this may be same as urdf_path_)
Definition at line 119 of file urdf_config.hpp.
◆ urdf_string_
| std::string moveit_setup::URDFConfig::urdf_string_ |
|
protected |
◆ xacro_args_
| std::string moveit_setup::URDFConfig::xacro_args_ |
|
protected |
◆ xacro_args_vec_
| std::vector<std::string> moveit_setup::URDFConfig::xacro_args_vec_ |
|
protected |
The documentation for this class was generated from the following files:
- moveit_setup_assistant/moveit_setup_framework/include/moveit_setup_framework/data/urdf_config.hpp
- moveit_setup_assistant/moveit_setup_framework/src/urdf_config.cpp

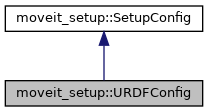
 Public Member Functions inherited from moveit_setup::SetupConfig
Public Member Functions inherited from moveit_setup::SetupConfig