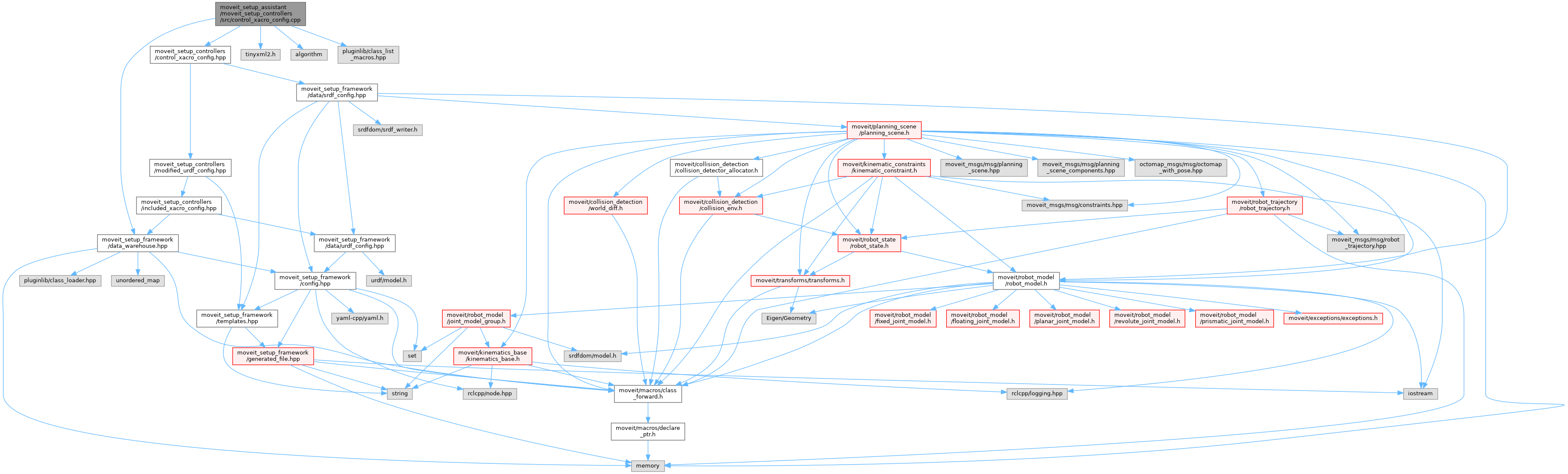
#include <moveit_setup_controllers/control_xacro_config.hpp>#include <moveit_setup_framework/data_warehouse.hpp>#include <tinyxml2.h>#include <algorithm>#include <pluginlib/class_list_macros.hpp>
Include dependency graph for control_xacro_config.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit_setup |
| namespace | moveit_setup::controllers |
Functions | |
| void | moveit_setup::controllers::getInterfaceNames (const tinyxml2::XMLElement *joint_el, const std::string &element_name, std::vector< std::string > &interface_names) |
| void | moveit_setup::controllers::uniqueMerge (std::vector< std::string > &main, const std::vector< std::string > &addition) |
| bool | moveit_setup::controllers::getControlInterfaceHelper (const std::unordered_map< std::string, ControlInterfaces > &interfaces, const std::string &joint_name, ControlInterfaces &ci) |