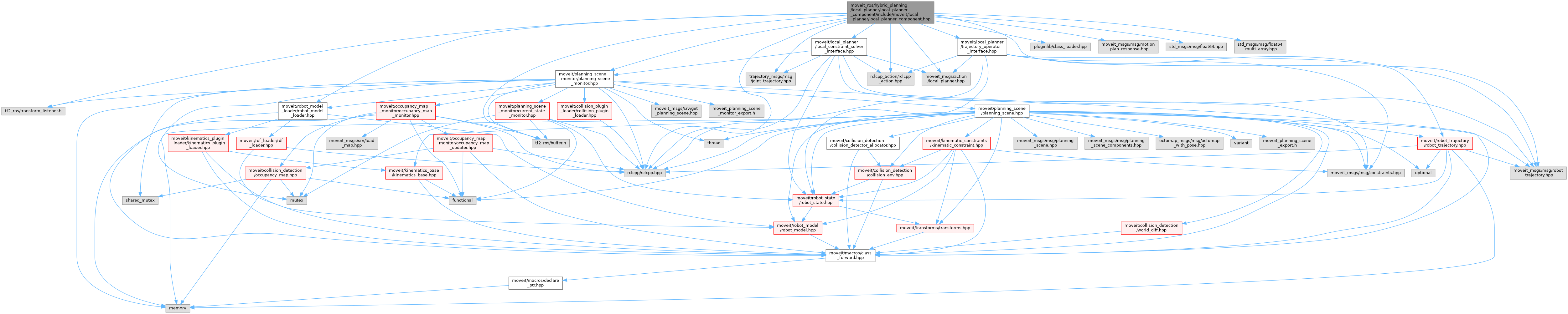
#include <rclcpp/rclcpp.hpp>#include <rclcpp/version.h>#include <rclcpp_action/rclcpp_action.hpp>#include <pluginlib/class_loader.hpp>#include <moveit_msgs/action/local_planner.hpp>#include <moveit_msgs/msg/motion_plan_response.hpp>#include <moveit_msgs/msg/robot_trajectory.hpp>#include <std_msgs/msg/float64.hpp>#include <std_msgs/msg/float64_multi_array.hpp>#include <trajectory_msgs/msg/joint_trajectory.hpp>#include <moveit/planning_scene_monitor/planning_scene_monitor.hpp>#include <moveit/robot_model_loader/robot_model_loader.hpp>#include <moveit/local_planner/local_constraint_solver_interface.hpp>#include <moveit/local_planner/trajectory_operator_interface.hpp>#include <tf2_ros/buffer.h>#include <tf2_ros/transform_listener.h>
Include dependency graph for local_planner_component.hpp:
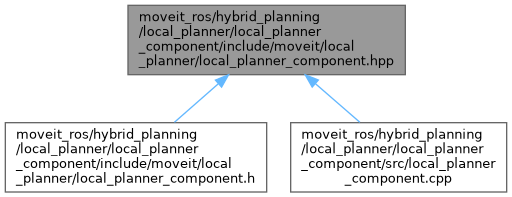
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | moveit::hybrid_planning::LocalPlannerComponent |
Namespaces | |
| namespace | local_planner_parameters |
| namespace | moveit |
| Main namespace for MoveIt. | |
| namespace | moveit::hybrid_planning |
Enumerations | |
| enum class | moveit::hybrid_planning::LocalPlannerState : int8_t { moveit::hybrid_planning::ABORT = -1 , moveit::hybrid_planning::ERROR = 0 , moveit::hybrid_planning::UNCONFIGURED = 1 , moveit::hybrid_planning::AWAIT_GLOBAL_TRAJECTORY = 2 , moveit::hybrid_planning::LOCAL_PLANNING_ACTIVE = 3 } |
Functions | |
| local_planner_parameters::MOVEIT_STRUCT_FORWARD (Params) | |