: Helper functions for visualizing trajectory markers for STOMP planning iterations. More...
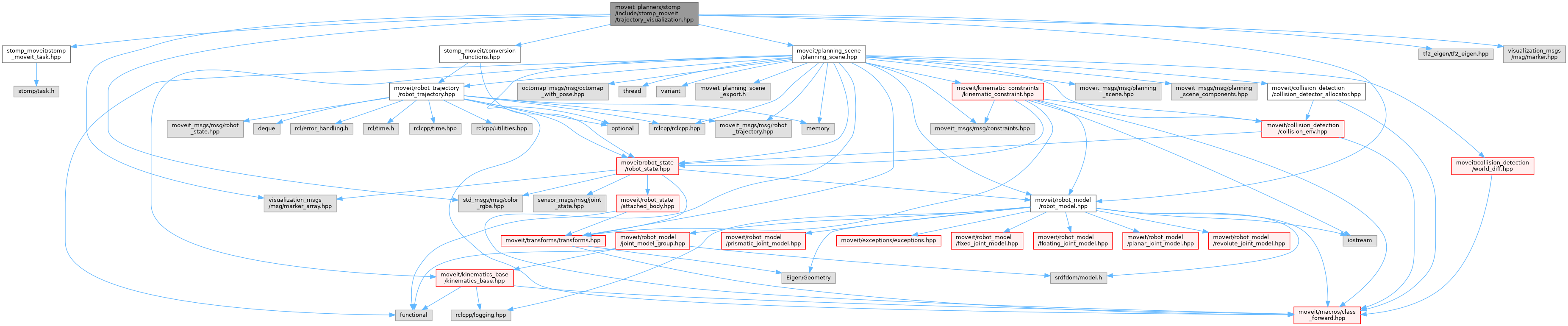
#include <stomp_moveit/stomp_moveit_task.hpp>#include <stomp_moveit/conversion_functions.hpp>#include <moveit/planning_scene/planning_scene.hpp>#include <moveit/robot_model/robot_model.hpp>#include <std_msgs/msg/color_rgba.hpp>#include <tf2_eigen/tf2_eigen.hpp>#include <visualization_msgs/msg/marker.hpp>#include <visualization_msgs/msg/marker_array.hpp>
Include dependency graph for trajectory_visualization.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | stomp_moveit |
| namespace | stomp_moveit::visualization |
Functions | |
| PostIterationFn | stomp_moveit::visualization::getIterationPathPublisher (const rclcpp::Publisher< visualization_msgs::msg::MarkerArray >::SharedPtr &marker_publisher, const std::shared_ptr< const planning_scene::PlanningScene > &planning_scene, const moveit::core::JointModelGroup *group) |
| Get post iteration function that publishes the EE path of the generated trajectory. | |
| DoneFn | stomp_moveit::visualization::getSuccessTrajectoryPublisher (const rclcpp::Publisher< visualization_msgs::msg::MarkerArray >::SharedPtr &marker_publisher, const std::shared_ptr< const planning_scene::PlanningScene > &planning_scene, const moveit::core::JointModelGroup *group) |
| Get Done function that publishes the EE path of the generated trajectory. | |
Detailed Description
: Helper functions for visualizing trajectory markers for STOMP planning iterations.
Definition in file trajectory_visualization.hpp.