Namespaces | |
| namespace | costs |
| namespace | filters |
| namespace | math |
| namespace | noise |
| namespace | visualization |
Classes | |
| class | ComposableTask |
| class | StompPlannerManager |
| class | StompPlanningContext |
Typedefs | |
| using | Joints = std::vector< const moveit::core::JointModel * > |
| using | StateValidatorFn = std::function< double(const Eigen::VectorXd &state_positions)> |
| using | NoiseGeneratorFn = std::function< bool(const Eigen::MatrixXd &values, Eigen::MatrixXd &noisy_values, Eigen::MatrixXd &noise)> |
| using | CostFn = std::function< bool(const Eigen::MatrixXd &values, Eigen::VectorXd &costs, bool &validity)> |
| using | FilterFn = std::function< bool(const Eigen::MatrixXd &values, Eigen::MatrixXd &filtered_values)> |
| using | PostIterationFn = std::function< void(int iteration_number, double cost, const Eigen::MatrixXd &values)> |
| using | DoneFn = std::function< void(bool success, int total_iterations, double final_cost, const Eigen::MatrixXd &values)> |
Functions | |
| std::vector< double > | getPositions (const moveit::core::RobotState &state, const Joints &joints) |
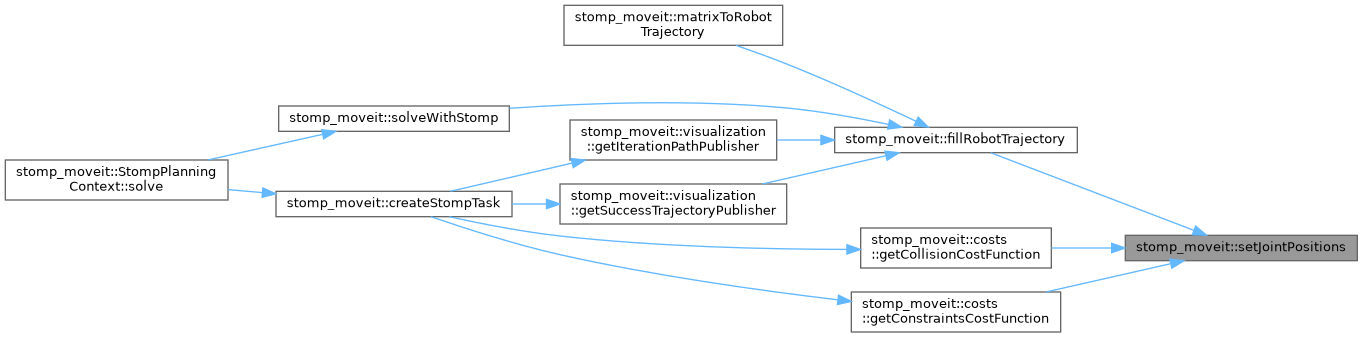
| void | setJointPositions (const Eigen::VectorXd &values, const Joints &joints, moveit::core::RobotState &state) |
| void | fillRobotTrajectory (const Eigen::MatrixXd &trajectory_values, const moveit::core::RobotState &reference_state, robot_trajectory::RobotTrajectory &trajectory) |
| robot_trajectory::RobotTrajectory | matrixToRobotTrajectory (const Eigen::MatrixXd &trajectory_values, const moveit::core::RobotState &reference_state, const moveit::core::JointModelGroup *group=nullptr) |
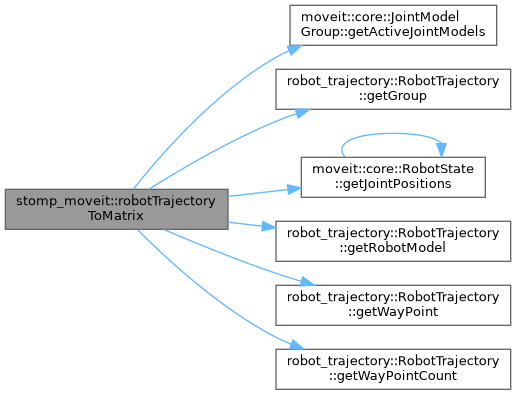
| Eigen::MatrixXd | robotTrajectoryToMatrix (const robot_trajectory::RobotTrajectory &trajectory) |
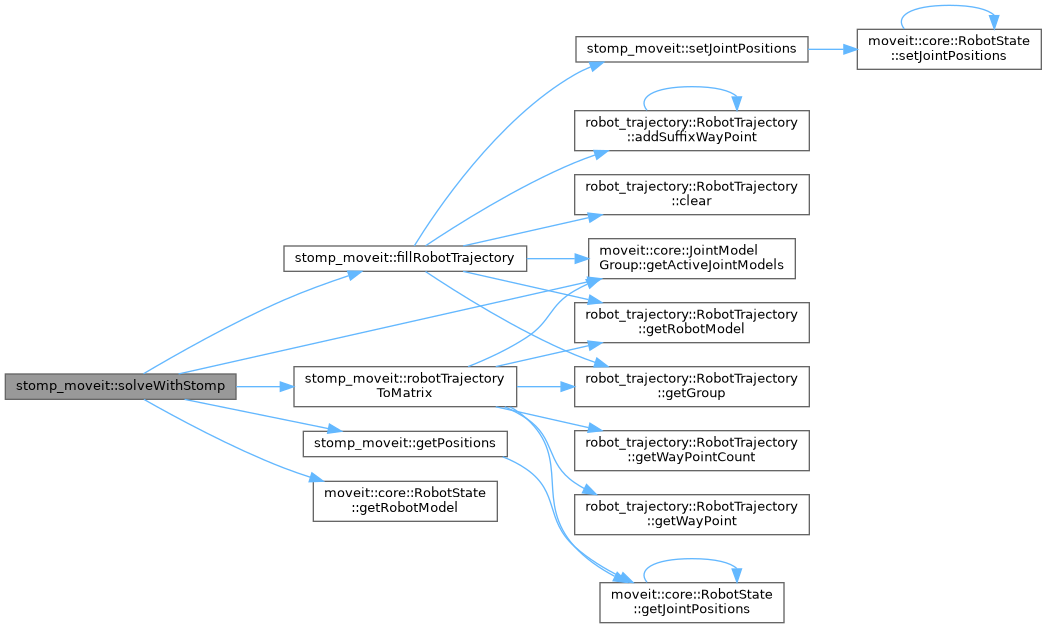
| bool | solveWithStomp (const std::shared_ptr< stomp::Stomp > &stomp, const moveit::core::RobotState &start_state, const moveit::core::RobotState &goal_state, const moveit::core::JointModelGroup *group, const robot_trajectory::RobotTrajectoryPtr &input_trajectory, robot_trajectory::RobotTrajectoryPtr &output_trajectory) |
| bool | extractSeedTrajectory (const planning_interface::MotionPlanRequest &req, const moveit::core::RobotModelConstPtr &robot_model, robot_trajectory::RobotTrajectoryPtr &seed) |
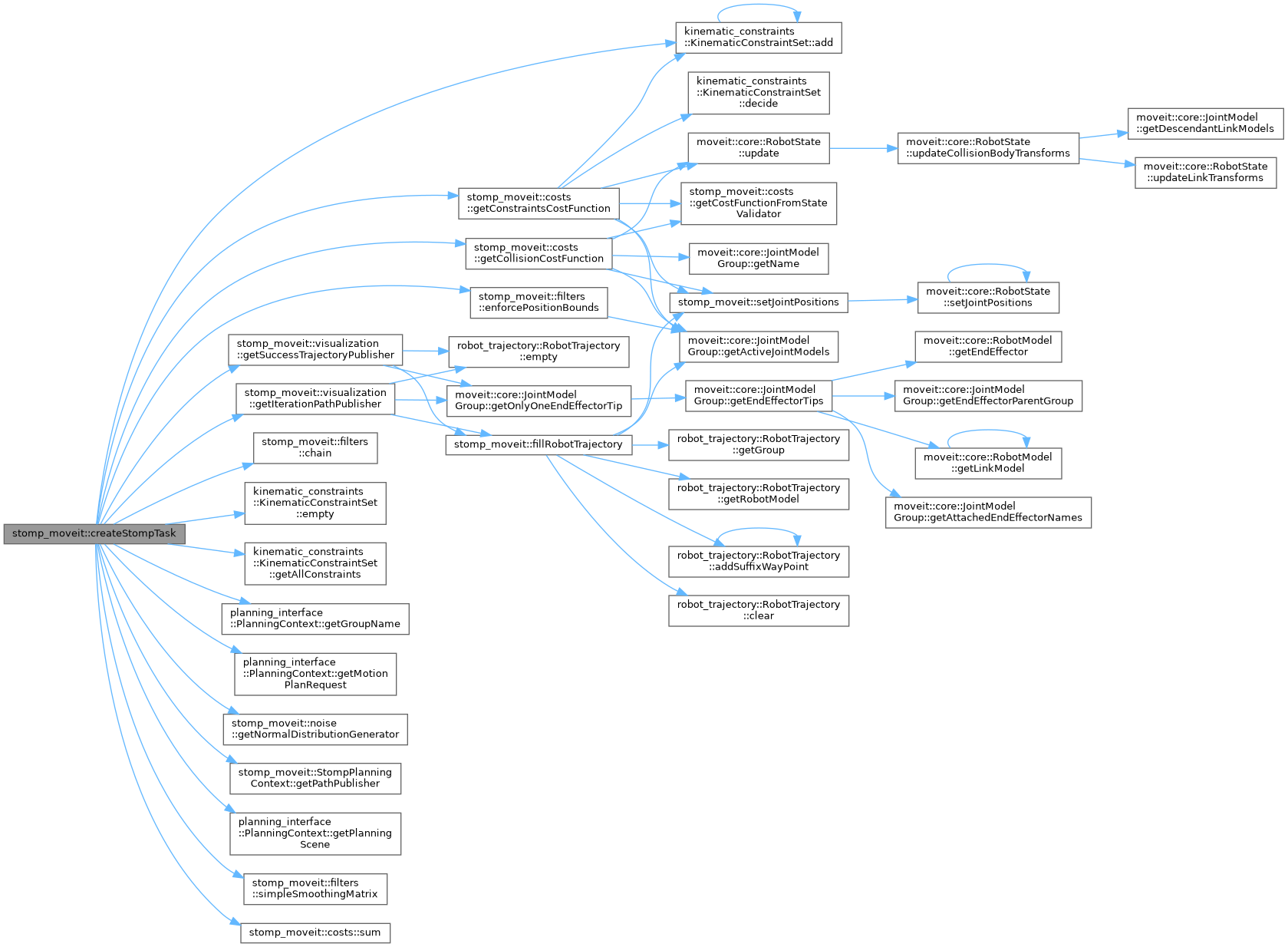
| stomp::TaskPtr | createStompTask (const stomp::StompConfiguration &config, StompPlanningContext &context) |
| stomp::StompConfiguration | getStompConfig (const stomp_moveit::Params ¶ms, size_t num_dimensions) |
Typedef Documentation
◆ CostFn
| using stomp_moveit::CostFn = typedef std::function<bool(const Eigen::MatrixXd& values, Eigen::VectorXd& costs, bool& validity)> |
Definition at line 65 of file stomp_moveit_task.hpp.
◆ DoneFn
| using stomp_moveit::DoneFn = typedef std::function<void(bool success, int total_iterations, double final_cost, const Eigen::MatrixXd& values)> |
Definition at line 71 of file stomp_moveit_task.hpp.
◆ FilterFn
| using stomp_moveit::FilterFn = typedef std::function<bool(const Eigen::MatrixXd& values, Eigen::MatrixXd& filtered_values)> |
Definition at line 67 of file stomp_moveit_task.hpp.
◆ Joints
| using stomp_moveit::Joints = typedef std::vector<const moveit::core::JointModel*> |
Definition at line 47 of file conversion_functions.hpp.
◆ NoiseGeneratorFn
| using stomp_moveit::NoiseGeneratorFn = typedef std::function<bool(const Eigen::MatrixXd& values, Eigen::MatrixXd& noisy_values, Eigen::MatrixXd& noise)> |
Definition at line 62 of file stomp_moveit_task.hpp.
◆ PostIterationFn
| using stomp_moveit::PostIterationFn = typedef std::function<void(int iteration_number, double cost, const Eigen::MatrixXd& values)> |
Definition at line 69 of file stomp_moveit_task.hpp.
◆ StateValidatorFn
| using stomp_moveit::StateValidatorFn = typedef std::function<double(const Eigen::VectorXd& state_positions)> |
Definition at line 53 of file cost_functions.hpp.
Function Documentation
◆ createStompTask()
| stomp::TaskPtr stomp_moveit::createStompTask | ( | const stomp::StompConfiguration & | config, |
| StompPlanningContext & | context | ||
| ) |
Definition at line 147 of file stomp_moveit_planning_context.cpp.

◆ extractSeedTrajectory()
| bool stomp_moveit::extractSeedTrajectory | ( | const planning_interface::MotionPlanRequest & | req, |
| const moveit::core::RobotModelConstPtr & | robot_model, | ||
| robot_trajectory::RobotTrajectoryPtr & | seed | ||
| ) |
Definition at line 94 of file stomp_moveit_planning_context.cpp.


◆ fillRobotTrajectory()
| void stomp_moveit::fillRobotTrajectory | ( | const Eigen::MatrixXd & | trajectory_values, |
| const moveit::core::RobotState & | reference_state, | ||
| robot_trajectory::RobotTrajectory & | trajectory | ||
| ) |
Writes the provided position value sequence into a robot trajectory.
- Parameters
-
trajectory_values The joint value sequence to copy the waypoints from reference_state A robot state providing default joint values and robot model trajectory The robot trajectory containing waypoints with updated values
Definition at line 92 of file conversion_functions.hpp.


◆ getPositions()
| std::vector< double > stomp_moveit::getPositions | ( | const moveit::core::RobotState & | state, |
| const Joints & | joints | ||
| ) |
Copies the position values of a robot state filtered by the provided joints.
- Parameters
-
state The RobotState to copy the values from joints The joints that should be considered
- Returns
- The vector containing the joint values
Definition at line 57 of file conversion_functions.hpp.


◆ getStompConfig()
| stomp::StompConfiguration stomp_moveit::getStompConfig | ( | const stomp_moveit::Params & | params, |
| size_t | num_dimensions | ||
| ) |
Definition at line 191 of file stomp_moveit_planning_context.cpp.

◆ matrixToRobotTrajectory()
| robot_trajectory::RobotTrajectory stomp_moveit::matrixToRobotTrajectory | ( | const Eigen::MatrixXd & | trajectory_values, |
| const moveit::core::RobotState & | reference_state, | ||
| const moveit::core::JointModelGroup * | group = nullptr |
||
| ) |
Constructs a new robot trajectory with the waypoints provided in the input matrix.
- Parameters
-
trajectory_values The waypoints and positions to copy reference_state The RobotState with default joint values and robot model group An optional JointModelGroup to filter for joints
- Returns
- The created RobotTrajectory containing updated waypoints
Definition at line 118 of file conversion_functions.hpp.

◆ robotTrajectoryToMatrix()
| Eigen::MatrixXd stomp_moveit::robotTrajectoryToMatrix | ( | const robot_trajectory::RobotTrajectory & | trajectory | ) |
Copies the waypoint positions of a RobotTrajectory into an Eigen matrix.
- Parameters
-
trajectory The RobotTrajectory to read the waypoint positions fromi
- Returns
- The matrix representing a sequence of waypoint positions
Definition at line 134 of file conversion_functions.hpp.

◆ setJointPositions()
| void stomp_moveit::setJointPositions | ( | const Eigen::VectorXd & | values, |
| const Joints & | joints, | ||
| moveit::core::RobotState & | state | ||
| ) |
Writes the provided position values into a robot state.
This function requires the dimension of values and joints to be equal!
- Parameters
-
values The joint position values to copy from joints The joints that should be considered state The robot state to update with the new joint values
Definition at line 77 of file conversion_functions.hpp.

◆ solveWithStomp()
| bool stomp_moveit::solveWithStomp | ( | const std::shared_ptr< stomp::Stomp > & | stomp, |
| const moveit::core::RobotState & | start_state, | ||
| const moveit::core::RobotState & | goal_state, | ||
| const moveit::core::JointModelGroup * | group, | ||
| const robot_trajectory::RobotTrajectoryPtr & | input_trajectory, | ||
| robot_trajectory::RobotTrajectoryPtr & | output_trajectory | ||
| ) |
Definition at line 67 of file stomp_moveit_planning_context.cpp.