Functions | |
| PostIterationFn | getIterationPathPublisher (const rclcpp::Publisher< visualization_msgs::msg::MarkerArray >::SharedPtr &marker_publisher, const std::shared_ptr< const planning_scene::PlanningScene > &planning_scene, const moveit::core::JointModelGroup *group) |
| Get post iteration function that publishes the EE path of the generated trajectory. | |
| DoneFn | getSuccessTrajectoryPublisher (const rclcpp::Publisher< visualization_msgs::msg::MarkerArray >::SharedPtr &marker_publisher, const std::shared_ptr< const planning_scene::PlanningScene > &planning_scene, const moveit::core::JointModelGroup *group) |
| Get Done function that publishes the EE path of the generated trajectory. | |
Function Documentation
◆ getIterationPathPublisher()
| PostIterationFn stomp_moveit::visualization::getIterationPathPublisher | ( | const rclcpp::Publisher< visualization_msgs::msg::MarkerArray >::SharedPtr & | marker_publisher, |
| const std::shared_ptr< const planning_scene::PlanningScene > & | planning_scene, | ||
| const moveit::core::JointModelGroup * | group | ||
| ) |
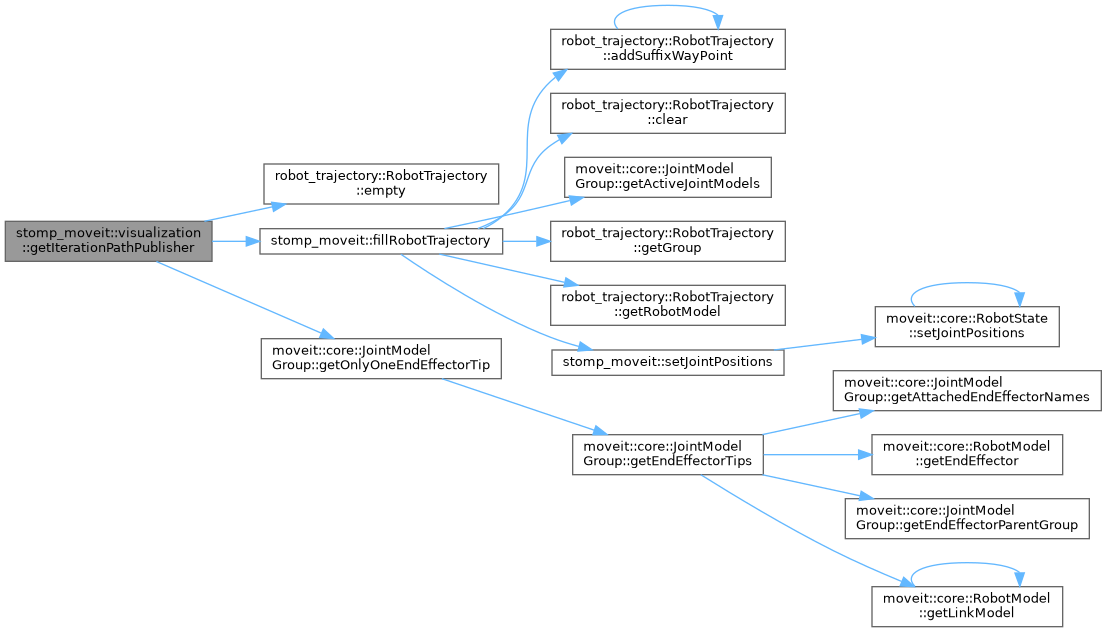
Get post iteration function that publishes the EE path of the generated trajectory.
- Parameters
-
marker_publisher Marker publisher that is used to publish the path planning_scene Current planning scene group JointModelGroup to identify the EE tip
- Returns
- If the marker_publisher is not a nullptr a post-iteration function that publishes the generated EE path is returned. Otherwise, a function that does nothing.
Definition at line 120 of file trajectory_visualization.hpp.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ getSuccessTrajectoryPublisher()
| DoneFn stomp_moveit::visualization::getSuccessTrajectoryPublisher | ( | const rclcpp::Publisher< visualization_msgs::msg::MarkerArray >::SharedPtr & | marker_publisher, |
| const std::shared_ptr< const planning_scene::PlanningScene > & | planning_scene, | ||
| const moveit::core::JointModelGroup * | group | ||
| ) |
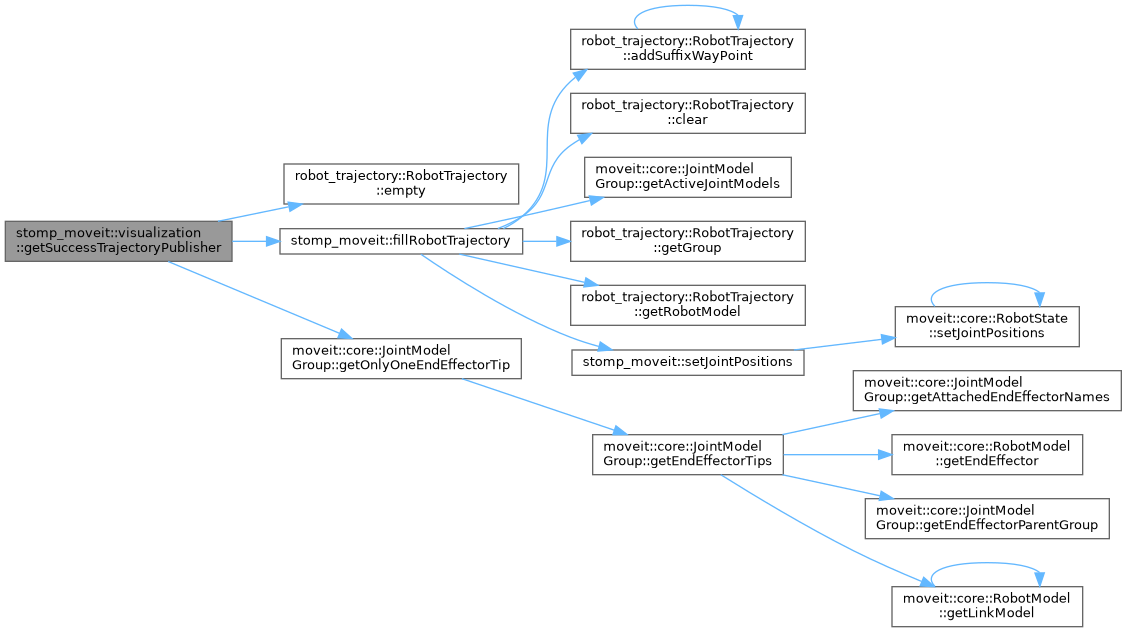
Get Done function that publishes the EE path of the generated trajectory.
- Parameters
-
marker_publisher Marker publisher that is used to publish the path planning_scene Current planning scene group JointModelGroup to identify the EE tip
- Returns
- If the marker_publisher is not a nullptr a Done function that publishes the generated EE path is returned. Otherwise, a function that does nothing.
Definition at line 160 of file trajectory_visualization.hpp.
Here is the call graph for this function:
Here is the caller graph for this function:
