The constraint samplers namespace contains a number of methods for generating samples based on a constraint or set of constraints. More...
Classes | |
| class | ConstraintSampler |
| ConstraintSampler is an abstract base class that allows the sampling of a kinematic state for a particular group of a robot. More... | |
| class | ConstraintSamplerAllocator |
| class | ConstraintSamplerManager |
| This class assists in the generation of a ConstraintSampler for a particular group from a moveit_msgs::msg::Constraints. More... | |
| class | IKConstraintSampler |
| A class that allows the sampling of IK constraints. More... | |
| struct | IKSamplingPose |
| A structure for potentially holding a position constraint and an orientation constraint for use during Ik Sampling. More... | |
| class | JointConstraintSampler |
| JointConstraintSampler is a class that allows the sampling of joints in a particular group of the robot, subject to a set of individual joint constraints. More... | |
| struct | OrderSamplers |
| class | UnionConstraintSampler |
| This class exists as a union of constraint samplers. It contains a vector of constraint samplers, and will sample from each of them. More... | |
Functions | |
| MOVEIT_CLASS_FORWARD (ConstraintSampler) | |
| MOVEIT_CLASS_FORWARD (ConstraintSamplerAllocator) | |
| MOVEIT_CLASS_FORWARD (ConstraintSamplerManager) | |
| void | visualizeDistribution (const ConstraintSamplerPtr &sampler, const moveit::core::RobotState &reference_state, const std::string &link_name, unsigned int sample_count, visualization_msgs::msg::MarkerArray &markers) |
| void | visualizeDistribution (const moveit_msgs::msg::Constraints &constr, const planning_scene::PlanningSceneConstPtr &scene, const std::string &group, const std::string &link_name, unsigned int sample_count, visualization_msgs::msg::MarkerArray &markers) |
| double | countSamplesPerSecond (const ConstraintSamplerPtr &sampler, const moveit::core::RobotState &reference_state) |
| double | countSamplesPerSecond (const moveit_msgs::msg::Constraints &constr, const planning_scene::PlanningSceneConstPtr &scene, const std::string &group) |
| MOVEIT_CLASS_FORWARD (JointConstraintSampler) | |
| MOVEIT_CLASS_FORWARD (IKConstraintSampler) | |
Detailed Description
The constraint samplers namespace contains a number of methods for generating samples based on a constraint or set of constraints.
It intended for use by any algorithm that requires a constraint-aware sampling strategy.
Function Documentation
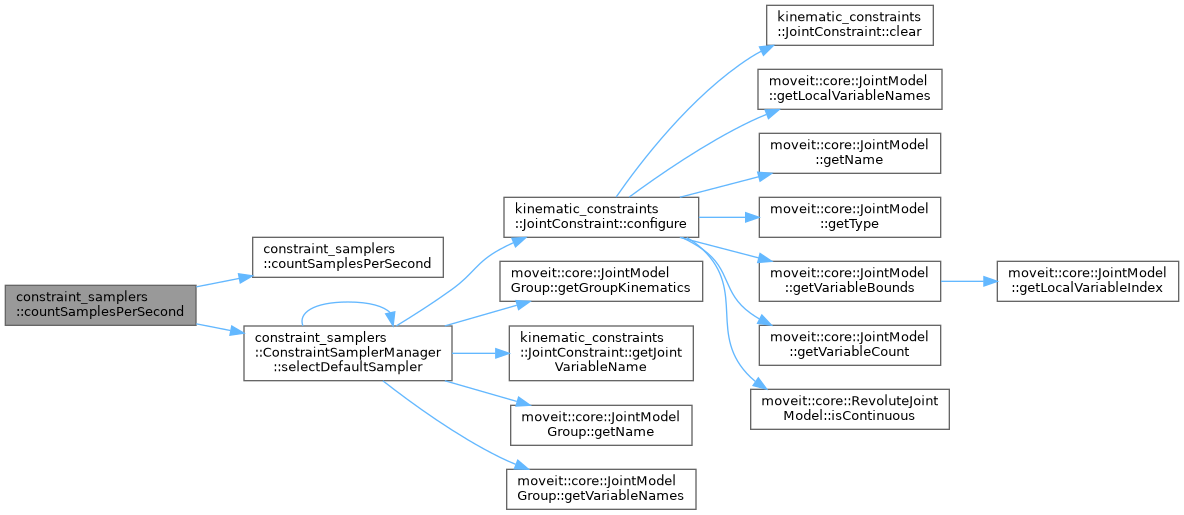
◆ countSamplesPerSecond() [1/2]
| double constraint_samplers::countSamplesPerSecond | ( | const ConstraintSamplerPtr & | sampler, |
| const moveit::core::RobotState & | reference_state | ||
| ) |
Definition at line 72 of file constraint_sampler_tools.cpp.
Here is the caller graph for this function:

◆ countSamplesPerSecond() [2/2]
| double constraint_samplers::countSamplesPerSecond | ( | const moveit_msgs::msg::Constraints & | constr, |
| const planning_scene::PlanningSceneConstPtr & | scene, | ||
| const std::string & | group | ||
| ) |
Definition at line 65 of file constraint_sampler_tools.cpp.
Here is the call graph for this function:
◆ MOVEIT_CLASS_FORWARD() [1/5]
| constraint_samplers::MOVEIT_CLASS_FORWARD | ( | ConstraintSampler | ) |
◆ MOVEIT_CLASS_FORWARD() [2/5]
| constraint_samplers::MOVEIT_CLASS_FORWARD | ( | ConstraintSamplerAllocator | ) |
◆ MOVEIT_CLASS_FORWARD() [3/5]
| constraint_samplers::MOVEIT_CLASS_FORWARD | ( | ConstraintSamplerManager | ) |
◆ MOVEIT_CLASS_FORWARD() [4/5]
| constraint_samplers::MOVEIT_CLASS_FORWARD | ( | IKConstraintSampler | ) |
◆ MOVEIT_CLASS_FORWARD() [5/5]
| constraint_samplers::MOVEIT_CLASS_FORWARD | ( | JointConstraintSampler | ) |
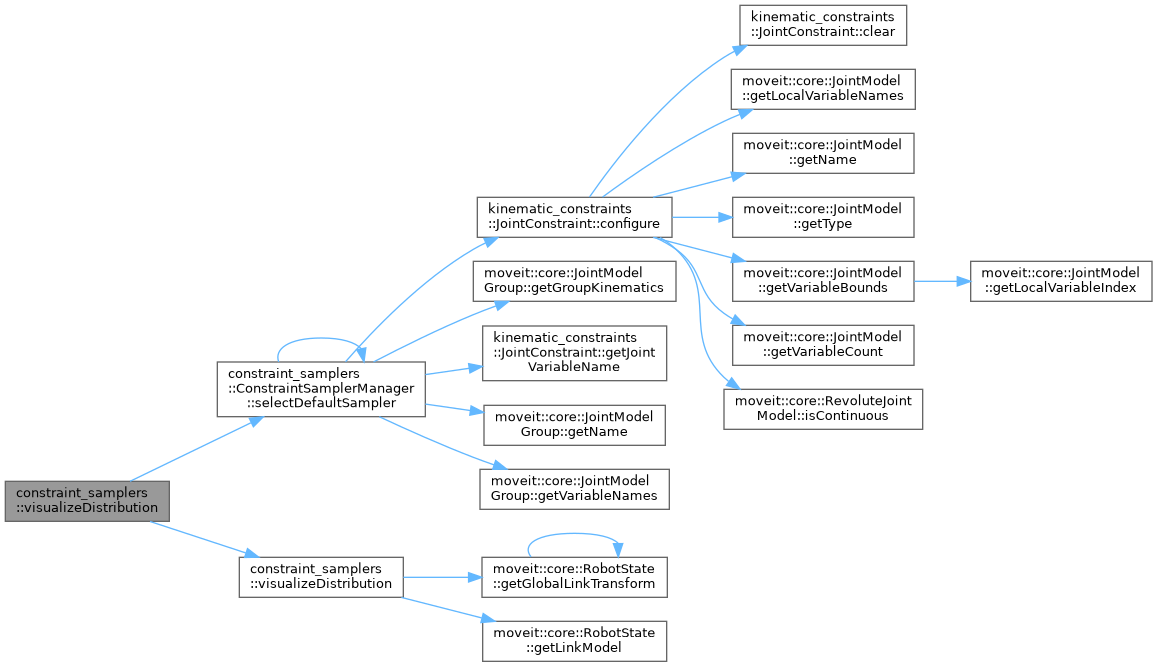
◆ visualizeDistribution() [1/2]
| void constraint_samplers::visualizeDistribution | ( | const ConstraintSamplerPtr & | sampler, |
| const moveit::core::RobotState & | reference_state, | ||
| const std::string & | link_name, | ||
| unsigned int | sample_count, | ||
| visualization_msgs::msg::MarkerArray & | markers | ||
| ) |
Definition at line 96 of file constraint_sampler_tools.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ visualizeDistribution() [2/2]
| void constraint_samplers::visualizeDistribution | ( | const moveit_msgs::msg::Constraints & | constr, |
| const planning_scene::PlanningSceneConstPtr & | scene, | ||
| const std::string & | group, | ||
| const std::string & | link_name, | ||
| unsigned int | sample_count, | ||
| visualization_msgs::msg::MarkerArray & | markers | ||
| ) |
Definition at line 56 of file constraint_sampler_tools.cpp.
Here is the call graph for this function: