Namespace for holding classes that generate distance fields. More...
Classes | |
| struct | CompareEigenVector3i |
| Struct for sorting type Eigen::Vector3i for use in sorted std containers. Sorts in z order, then y order, then x order. More... | |
| class | DistanceField |
| DistanceField is an abstract base class for computing distances from sets of 3D obstacle points. The distance assigned to a freespace cell should be the distance to the closest obstacle cell. Cells that are obstacle cells should either be marked as zero distance, or may have a negative distance if a signed version of the distance field is being used and an obstacle point is internal to an obstacle volume. More... | |
| class | PropagationDistanceField |
| A DistanceField implementation that uses a vector propagation method. Distances propagate outward from occupied cells, or inwards from unoccupied cells if negative distances are to be computed, which is optional. Outward and inward propagation only occur to a desired maximum distance - cells that are more than this maximum distance from the nearest cell will have maximum distance measurements. More... | |
| struct | PropDistanceFieldVoxel |
| Structure that holds voxel information for the DistanceField. Will be used in VoxelGrid. More... | |
| class | VoxelGrid |
| VoxelGrid holds a dense 3D, axis-aligned set of data at a given resolution, where the data is supplied as a template parameter. More... | |
Enumerations | |
| enum | PlaneVisualizationType { XY_PLANE , XZ_PLANE , YZ_PLANE } |
| The plane to visualize. More... | |
| enum | Dimension { DIM_X = 0 , DIM_Y = 1 , DIM_Z = 2 } |
| Specifies dimension of different axes. More... | |
Functions | |
| MOVEIT_CLASS_FORWARD (DistanceField) | |
| void | findInternalPointsConvex (const bodies::Body &body, double resolution, EigenSTL::vector_Vector3d &points) |
| Find all points on a regular grid that are internal to the body, assuming the body is a convex shape. If the body is not convex then its convex hull is used. | |
Detailed Description
Namespace for holding classes that generate distance fields.
Distance fields are dense 3D representations containing the distance to the nearest obstacles.
Enumeration Type Documentation
◆ Dimension
Specifies dimension of different axes.
| Enumerator | |
|---|---|
| DIM_X | |
| DIM_Y | |
| DIM_Z | |
Definition at line 47 of file voxel_grid.hpp.
◆ PlaneVisualizationType
The plane to visualize.
| Enumerator | |
|---|---|
| XY_PLANE | |
| XZ_PLANE | |
| YZ_PLANE | |
Definition at line 68 of file distance_field.hpp.
Function Documentation
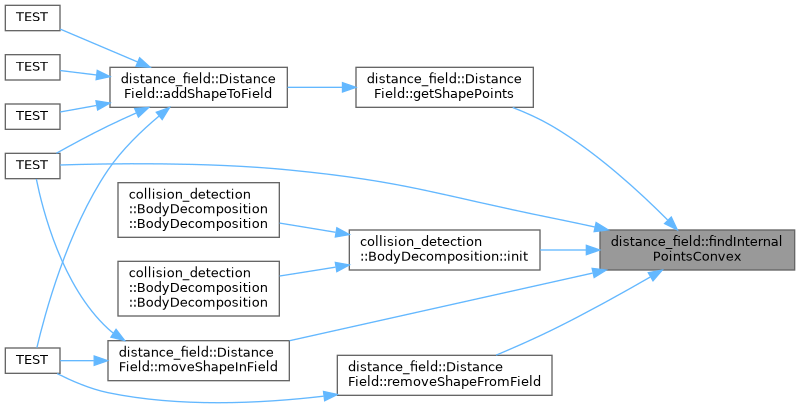
◆ findInternalPointsConvex()
| void distance_field::findInternalPointsConvex | ( | const bodies::Body & | body, |
| double | resolution, | ||
| EigenSTL::vector_Vector3d & | points | ||
| ) |
Find all points on a regular grid that are internal to the body, assuming the body is a convex shape. If the body is not convex then its convex hull is used.
- Parameters
-
[in] body The body to discretize [in] resolution The resolution at which to test [out] points The points internal to the body are appended to this vector.
Definition at line 39 of file find_internal_points.cpp.
Here is the caller graph for this function:
◆ MOVEIT_CLASS_FORWARD()
| distance_field::MOVEIT_CLASS_FORWARD | ( | DistanceField | ) |