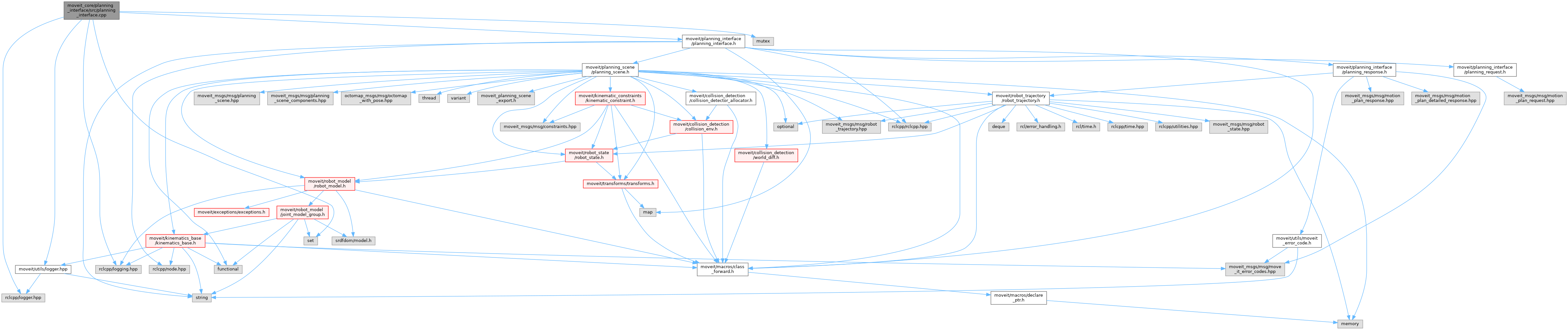
#include <moveit/planning_interface/planning_interface.hpp>#include <mutex>#include <rclcpp/logger.hpp>#include <rclcpp/logging.hpp>#include <set>#include <moveit/utils/logger.hpp>
Include dependency graph for planning_interface.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | planning_interface |
| This namespace includes the base class for MoveIt planners. | |
Variable Documentation
◆ contexts_
| std::set<PlanningContext*> contexts_ |
Definition at line 60 of file planning_interface.cpp.
◆ mutex_
| std::mutex mutex_ |
Definition at line 59 of file planning_interface.cpp.