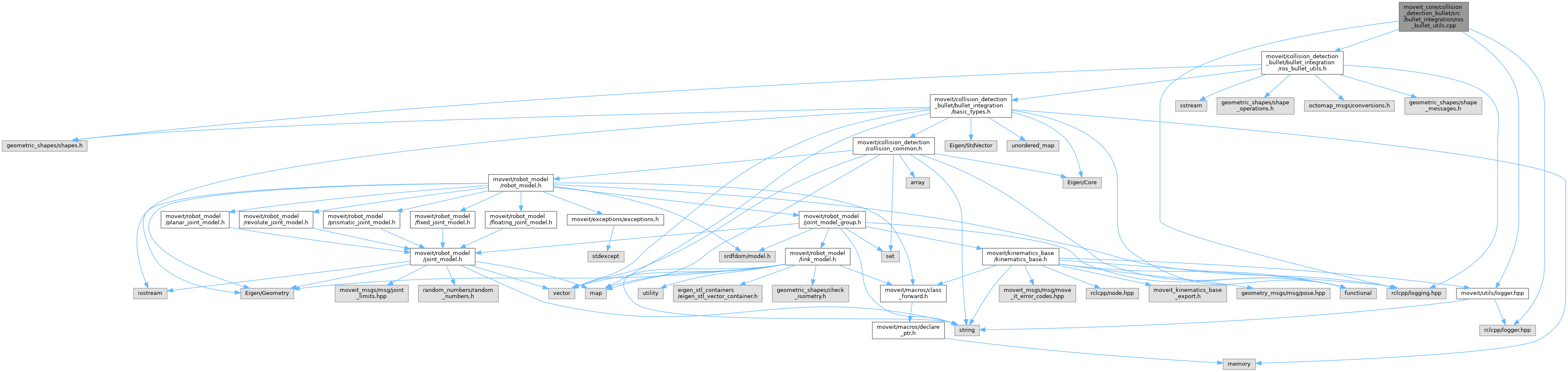
#include <moveit/collision_detection_bullet/bullet_integration/ros_bullet_utils.hpp>#include <rclcpp/logger.hpp>#include <rclcpp/logging.hpp>#include <moveit/utils/logger.hpp>
Include dependency graph for ros_bullet_utils.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | collision_detection_bullet |
Functions | |
| void | collision_detection_bullet::getActiveLinkNamesRecursive (std::vector< std::string > &active_links, const urdf::LinkConstSharedPtr &urdf_link, bool active) |
| Recursively traverses robot from root to get all active links. | |
| shapes::ShapePtr | collision_detection_bullet::constructShape (const urdf::Geometry *geom) |
| Eigen::Isometry3d | collision_detection_bullet::urdfPose2Eigen (const urdf::Pose &pose) |
| rclcpp::Logger | collision_detection_bullet::getLogger () |