#include <gtest/gtest.h>#include <moveit/online_signal_smoothing/acceleration_filter.hpp>#include <moveit/utils/robot_model_test_utils.hpp>
Include dependency graph for test_acceleration_filter.cpp:
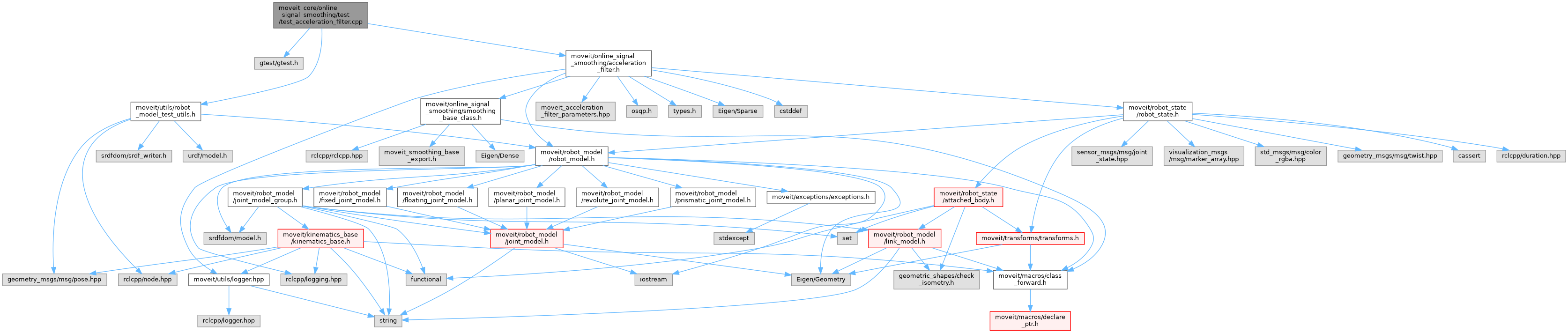
Go to the source code of this file.
Classes | |
| class | AccelerationFilterTest |
Functions | |
| TEST_F (AccelerationFilterTest, FilterInitialize) | |
| TEST_F (AccelerationFilterTest, FilterDoSmooth) | |
| TEST_F (AccelerationFilterTest, FilterBadAccelerationConfig) | |
| TEST_F (AccelerationFilterTest, FilterDoSmoothRandomized) | |
| int | main (int argc, char **argv) |
Variables | |
| constexpr std::string_view | PLANNING_GROUP_NAME = "panda_arm" |
| constexpr size_t | PANDA_NUM_JOINTS = 7u |
| constexpr std::string_view | ROBOT_MODEL = "panda" |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 202 of file test_acceleration_filter.cpp.
◆ TEST_F() [1/4]
| TEST_F | ( | AccelerationFilterTest | , |
| FilterBadAccelerationConfig | |||
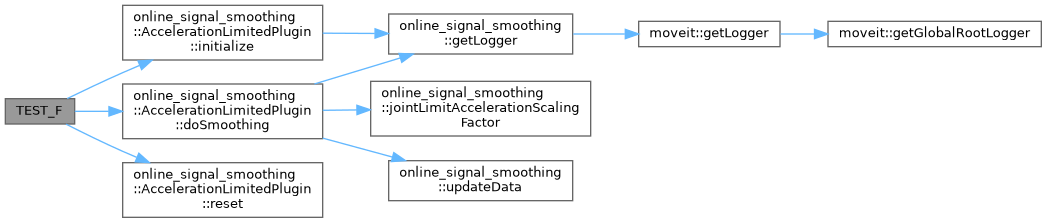
| ) |
Definition at line 159 of file test_acceleration_filter.cpp.
Here is the call graph for this function:
◆ TEST_F() [2/4]
| TEST_F | ( | AccelerationFilterTest | , |
| FilterDoSmooth | |||
| ) |
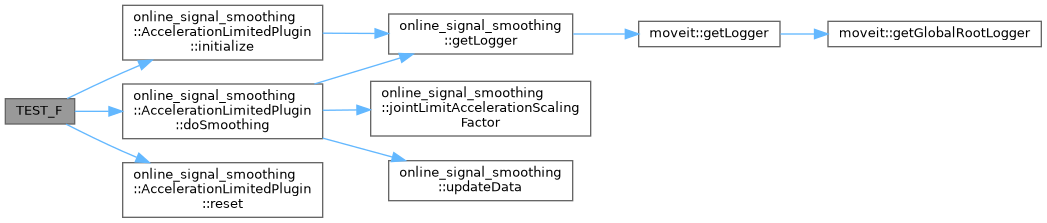
Definition at line 106 of file test_acceleration_filter.cpp.
Here is the call graph for this function:
◆ TEST_F() [3/4]
| TEST_F | ( | AccelerationFilterTest | , |
| FilterDoSmoothRandomized | |||
| ) |
Definition at line 177 of file test_acceleration_filter.cpp.
Here is the call graph for this function:
◆ TEST_F() [4/4]
| TEST_F | ( | AccelerationFilterTest | , |
| FilterInitialize | |||
| ) |
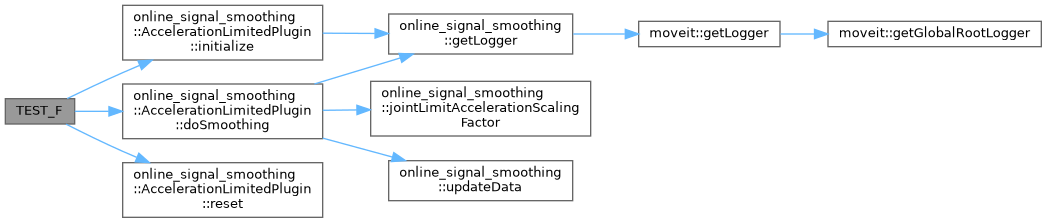
Definition at line 80 of file test_acceleration_filter.cpp.
Here is the call graph for this function:

Variable Documentation
◆ PANDA_NUM_JOINTS
|
constexpr |
Definition at line 40 of file test_acceleration_filter.cpp.
◆ PLANNING_GROUP_NAME
|
constexpr |
Definition at line 39 of file test_acceleration_filter.cpp.
◆ ROBOT_MODEL
|
constexpr |
Definition at line 41 of file test_acceleration_filter.cpp.