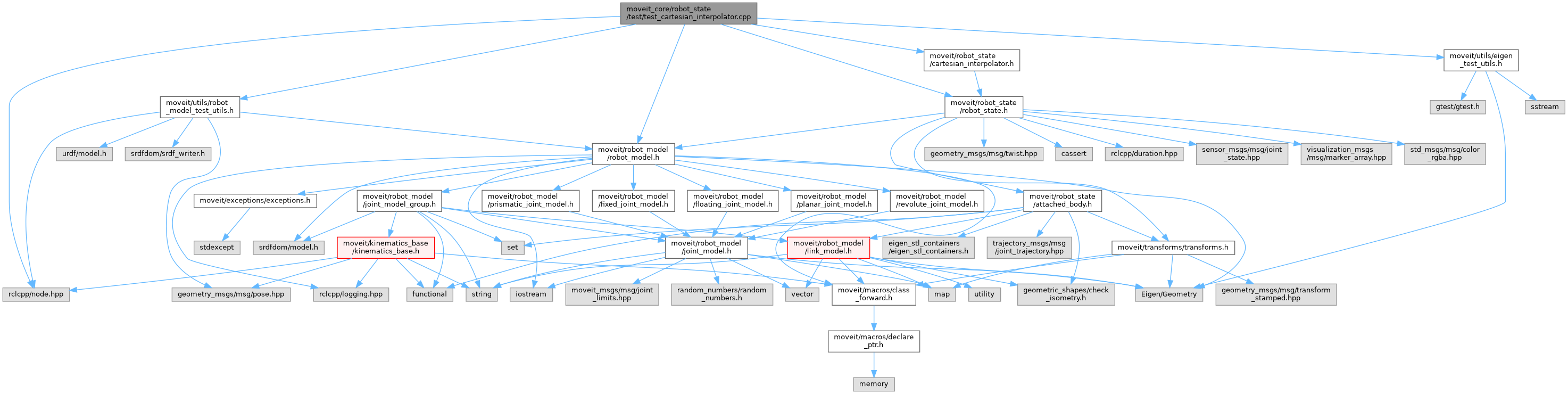
#include <moveit/robot_model/robot_model.hpp>#include <moveit/robot_state/robot_state.hpp>#include <moveit/robot_state/cartesian_interpolator.hpp>#include <moveit/utils/robot_model_test_utils.hpp>#include <moveit/utils/eigen_test_utils.hpp>#include <rclcpp/node.hpp>
Include dependency graph for test_cartesian_interpolator.cpp:
Go to the source code of this file.
Classes | |
| class | SimpleRobot |
Functions | |
| TEST_F (SimpleRobot, testGenerateTrajectory) | |
| TEST_F (SimpleRobot, checkAbsoluteJointSpaceJump) | |
| TEST_F (SimpleRobot, checkRelativeJointSpaceJump) | |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 351 of file test_cartesian_interpolator.cpp.
◆ TEST_F() [1/3]
| TEST_F | ( | SimpleRobot | , |
| checkAbsoluteJointSpaceJump | |||
| ) |
Definition at line 125 of file test_cartesian_interpolator.cpp.
Here is the call graph for this function:

◆ TEST_F() [2/3]
| TEST_F | ( | SimpleRobot | , |
| checkRelativeJointSpaceJump | |||
| ) |
Definition at line 169 of file test_cartesian_interpolator.cpp.
Here is the call graph for this function:

◆ TEST_F() [3/3]
| TEST_F | ( | SimpleRobot | , |
| testGenerateTrajectory | |||
| ) |
Definition at line 111 of file test_cartesian_interpolator.cpp.