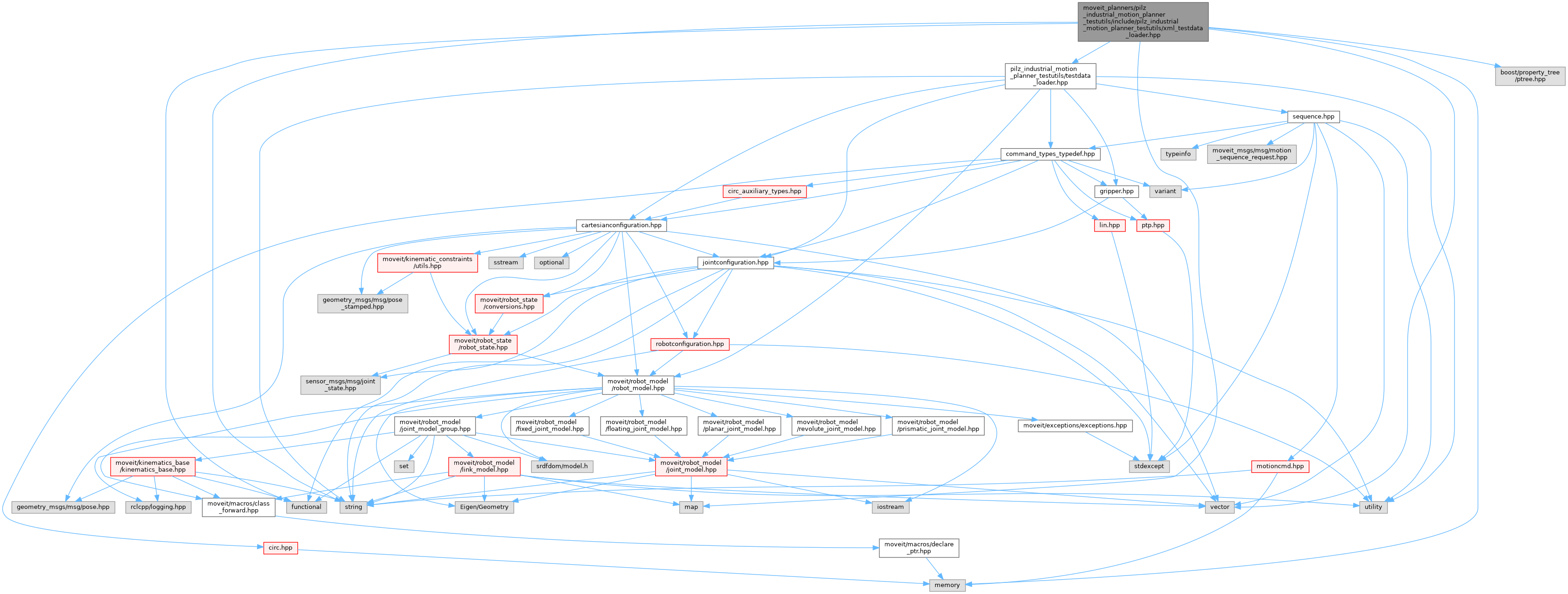
#include <string>#include <vector>#include <functional>#include <map>#include <memory>#include <boost/property_tree/ptree.hpp>#include <pilz_industrial_motion_planner_testutils/testdata_loader.hpp>
Include dependency graph for xml_testdata_loader.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pilz_industrial_motion_planner_testutils::XmlTestdataLoader |
| Implements a test data loader which uses a xml file to store the test data. More... | |
| class | pilz_industrial_motion_planner_testutils::XmlTestdataLoader::AbstractCmdGetterAdapter |
| Abstract base class providing a GENERIC getter-function signature which can be used to load DIFFERENT command types (like Ptp, Lin, etc.) from the test data file. More... | |
Namespaces | |
| namespace | pilz_industrial_motion_planner_testutils |
Typedefs | |
| using | pilz_industrial_motion_planner_testutils::XmlTestDataLoaderUPtr = std::unique_ptr< TestdataLoader > |