#include <planning_component.h>
Classes | |
| struct | PlanRequestParameters |
| Planner parameters provided with the MotionPlanRequest. More... | |
| struct | PlanSolution |
| The representation of a plan solution. More... | |
Public Types | |
| using | MoveItErrorCode = moveit::core::MoveItErrorCode |
Public Member Functions | |
| MOVEIT_STRUCT_FORWARD (PlanSolution) | |
| PlanningComponent (const std::string &group_name, const rclcpp::Node::SharedPtr &node) | |
| Constructor. More... | |
| PlanningComponent (const std::string &group_name, const MoveItCppPtr &moveit_cpp) | |
| PlanningComponent (const PlanningComponent &)=delete | |
| This class owns unique resources (e.g. action clients, threads) and its not very meaningful to copy. Pass by references, move it, or simply create multiple instances where required. More... | |
| PlanningComponent & | operator= (const PlanningComponent &)=delete |
| PlanningComponent (PlanningComponent &&other)=delete | |
| PlanningComponent & | operator= (PlanningComponent &&other)=delete |
| ~PlanningComponent ()=default | |
| Destructor. More... | |
| const std::string & | getPlanningGroupName () const |
| Get the name of the planning group. More... | |
| const std::vector< std::string > | getNamedTargetStates () |
| Get the names of the named robot states available as targets. More... | |
| std::map< std::string, double > | getNamedTargetStateValues (const std::string &name) |
| Get the joint values for targets specified by name. More... | |
| void | setWorkspace (double minx, double miny, double minz, double maxx, double maxy, double maxz) |
| Specify the workspace bounding box. The box is specified in the planning frame (i.e. relative to the robot root link start position). This is useful when the planning group contains the root joint of the robot – i.e. when planning motion for the robot relative to the world. More... | |
| void | unsetWorkspace () |
| Remove the workspace bounding box from planning. More... | |
| moveit::core::RobotStatePtr | getStartState () |
| Get the considered start state if defined, otherwise get the current state. More... | |
| bool | setStartState (const moveit::core::RobotState &start_state) |
| Set the robot state that should be considered as start state for planning. More... | |
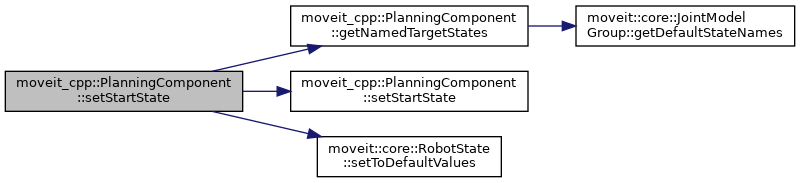
| bool | setStartState (const std::string &named_state) |
| Set the named robot state that should be considered as start state for planning. More... | |
| void | setStartStateToCurrentState () |
| Set the start state for planning to be the current state of the robot. More... | |
| bool | setGoal (const std::vector< moveit_msgs::msg::Constraints > &goal_constraints) |
| Set the goal constraints used for planning. More... | |
| bool | setGoal (const moveit::core::RobotState &goal_state) |
| Set the goal constraints generated from a target state. More... | |
| bool | setGoal (const geometry_msgs::msg::PoseStamped &goal_pose, const std::string &link_name) |
| Set the goal constraints generated from target pose and robot link. More... | |
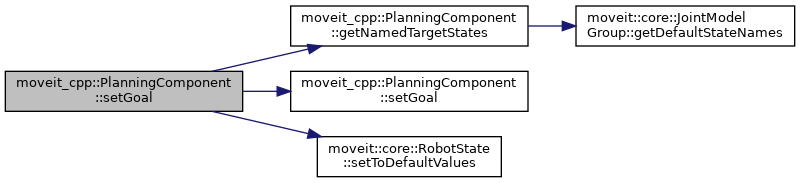
| bool | setGoal (const std::string &named_target) |
| Set the goal constraints generated from a named target state. More... | |
| bool | setPathConstraints (const moveit_msgs::msg::Constraints &path_constraints) |
| Set the path constraints generated from a moveit msg Constraints. More... | |
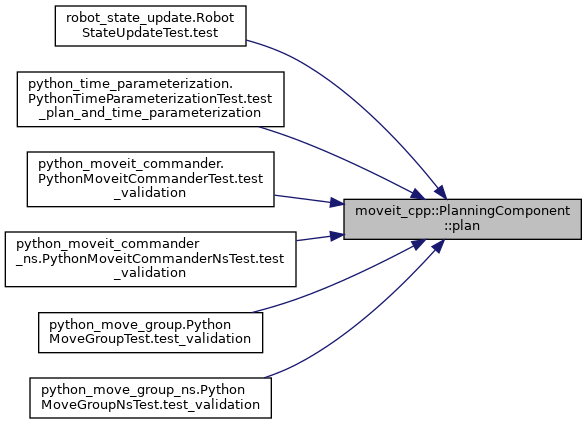
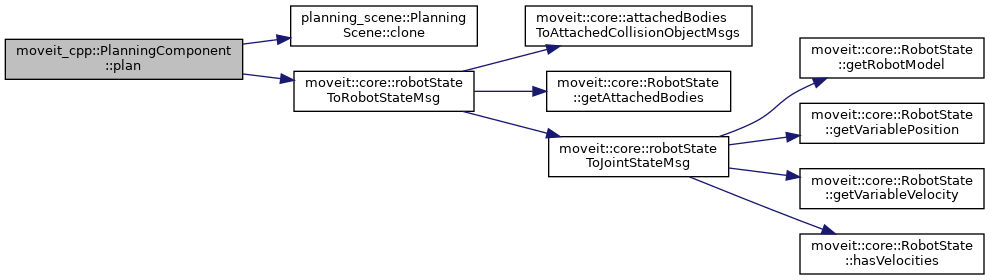
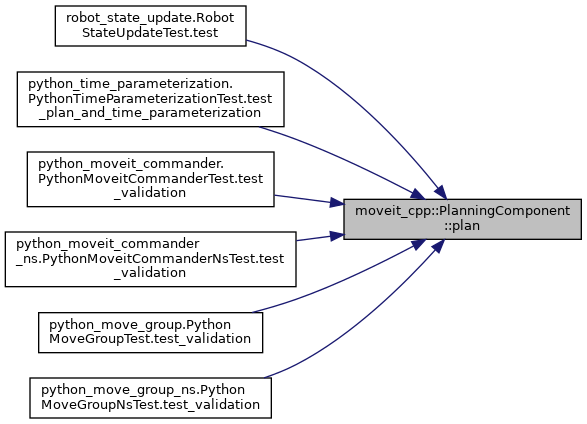
| PlanSolution | plan () |
| Run a plan from start or current state to fulfill the last goal constraints provided by setGoal() using default parameters. More... | |
| PlanSolution | plan (const PlanRequestParameters ¶meters) |
| Run a plan from start or current state to fulfill the last goal constraints provided by setGoal() using the provided PlanRequestParameters. More... | |
| bool | execute (bool blocking=true) |
| Execute the latest computed solution trajectory computed by plan(). By default this function terminates after the execution is complete. The execution can be run in background by setting blocking to false. More... | |
| const PlanSolutionPtr | getLastPlanSolution () |
| Return the last plan solution. More... | |
Detailed Description
Definition at line 51 of file planning_component.h.
Member Typedef Documentation
◆ MoveItErrorCode
Definition at line 56 of file planning_component.h.
Constructor & Destructor Documentation
◆ PlanningComponent() [1/4]
| moveit_cpp::PlanningComponent::PlanningComponent | ( | const std::string & | group_name, |
| const rclcpp::Node::SharedPtr & | node | ||
| ) |
Constructor.
Definition at line 71 of file planning_component.cpp.
◆ PlanningComponent() [2/4]
| moveit_cpp::PlanningComponent::PlanningComponent | ( | const std::string & | group_name, |
| const MoveItCppPtr & | moveit_cpp | ||
| ) |

◆ PlanningComponent() [3/4]
|
delete |
This class owns unique resources (e.g. action clients, threads) and its not very meaningful to copy. Pass by references, move it, or simply create multiple instances where required.
◆ PlanningComponent() [4/4]
|
delete |
◆ ~PlanningComponent()
|
default |
Destructor.
Member Function Documentation
◆ execute()
| bool moveit_cpp::PlanningComponent::execute | ( | bool | blocking = true | ) |
Execute the latest computed solution trajectory computed by plan(). By default this function terminates after the execution is complete. The execution can be run in background by setting blocking to false.
Definition at line 290 of file planning_component.cpp.

◆ getLastPlanSolution()
| const PlanningComponent::PlanSolutionPtr moveit_cpp::PlanningComponent::getLastPlanSolution | ( | ) |
Return the last plan solution.
Definition at line 309 of file planning_component.cpp.
◆ getNamedTargetStates()
| const std::vector< std::string > moveit_cpp::PlanningComponent::getNamedTargetStates | ( | ) |
Get the names of the named robot states available as targets.
Definition at line 84 of file planning_component.cpp.


◆ getNamedTargetStateValues()
| std::map< std::string, double > moveit_cpp::PlanningComponent::getNamedTargetStateValues | ( | const std::string & | name | ) |
Get the joint values for targets specified by name.
Definition at line 233 of file planning_component.cpp.

◆ getPlanningGroupName()
| const std::string & moveit_cpp::PlanningComponent::getPlanningGroupName | ( | ) | const |
Get the name of the planning group.
Definition at line 99 of file planning_component.cpp.
◆ getStartState()
| moveit::core::RobotStatePtr moveit_cpp::PlanningComponent::getStartState | ( | ) |
Get the considered start state if defined, otherwise get the current state.
Definition at line 203 of file planning_component.cpp.
◆ MOVEIT_STRUCT_FORWARD()
| moveit_cpp::PlanningComponent::MOVEIT_STRUCT_FORWARD | ( | PlanSolution | ) |
◆ operator=() [1/2]
|
delete |
◆ operator=() [2/2]
|
delete |
◆ plan() [1/2]
| PlanningComponent::PlanSolution moveit_cpp::PlanningComponent::plan | ( | ) |
Run a plan from start or current state to fulfill the last goal constraints provided by setGoal() using default parameters.
Definition at line 192 of file planning_component.cpp.
◆ plan() [2/2]
| PlanningComponent::PlanSolution moveit_cpp::PlanningComponent::plan | ( | const PlanRequestParameters & | parameters | ) |
Run a plan from start or current state to fulfill the last goal constraints provided by setGoal() using the provided PlanRequestParameters.
Definition at line 110 of file planning_component.cpp.
◆ setGoal() [1/4]
| bool moveit_cpp::PlanningComponent::setGoal | ( | const geometry_msgs::msg::PoseStamped & | goal_pose, |
| const std::string & | link_name | ||
| ) |
Set the goal constraints generated from target pose and robot link.
Definition at line 271 of file planning_component.cpp.

◆ setGoal() [2/4]
| bool moveit_cpp::PlanningComponent::setGoal | ( | const moveit::core::RobotState & | goal_state | ) |
Set the goal constraints generated from a target state.
Definition at line 265 of file planning_component.cpp.

◆ setGoal() [3/4]
| bool moveit_cpp::PlanningComponent::setGoal | ( | const std::string & | named_target | ) |
Set the goal constraints generated from a named target state.
Definition at line 277 of file planning_component.cpp.
◆ setGoal() [4/4]
| bool moveit_cpp::PlanningComponent::setGoal | ( | const std::vector< moveit_msgs::msg::Constraints > & | goal_constraints | ) |
Set the goal constraints used for planning.
Definition at line 259 of file planning_component.cpp.

◆ setPathConstraints()
| bool moveit_cpp::PlanningComponent::setPathConstraints | ( | const moveit_msgs::msg::Constraints & | path_constraints | ) |
Set the path constraints generated from a moveit msg Constraints.
Definition at line 104 of file planning_component.cpp.
◆ setStartState() [1/2]
| bool moveit_cpp::PlanningComponent::setStartState | ( | const moveit::core::RobotState & | start_state | ) |
Set the robot state that should be considered as start state for planning.
Definition at line 197 of file planning_component.cpp.

◆ setStartState() [2/2]
| bool moveit_cpp::PlanningComponent::setStartState | ( | const std::string & | named_state | ) |
Set the named robot state that should be considered as start state for planning.
Definition at line 215 of file planning_component.cpp.
◆ setStartStateToCurrentState()
| void moveit_cpp::PlanningComponent::setStartStateToCurrentState | ( | ) |
Set the start state for planning to be the current state of the robot.
Definition at line 228 of file planning_component.cpp.
◆ setWorkspace()
| void moveit_cpp::PlanningComponent::setWorkspace | ( | double | minx, |
| double | miny, | ||
| double | minz, | ||
| double | maxx, | ||
| double | maxy, | ||
| double | maxz | ||
| ) |
Specify the workspace bounding box. The box is specified in the planning frame (i.e. relative to the robot root link start position). This is useful when the planning group contains the root joint of the robot – i.e. when planning motion for the robot relative to the world.
Definition at line 241 of file planning_component.cpp.
◆ unsetWorkspace()
| void moveit_cpp::PlanningComponent::unsetWorkspace | ( | ) |
Remove the workspace bounding box from planning.
Definition at line 254 of file planning_component.cpp.
The documentation for this class was generated from the following files:
- moveit_ros/planning/moveit_cpp/include/moveit/moveit_cpp/planning_component.h
- moveit_ros/planning/moveit_cpp/src/planning_component.cpp