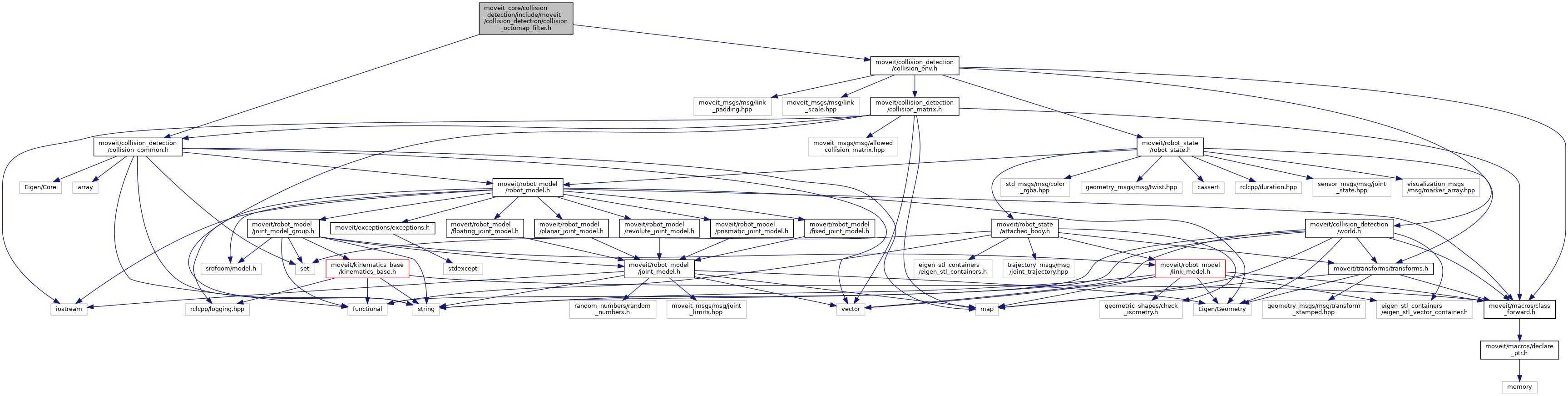
#include <moveit/collision_detection/collision_common.h>#include <moveit/collision_detection/collision_env.h>
Include dependency graph for collision_octomap_filter.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| collision_detection | |
Functions | |
| int | collision_detection::refineContactNormals (const World::ObjectConstPtr &object, CollisionResult &res, double cell_bbx_search_distance=1.0, double allowed_angle_divergence=0.0, bool estimate_depth=false, double iso_value=0.5, double metaball_radius_multiple=1.5) |
| Re-proceses contact normals for an octomap by estimating a metaball iso-surface using the centers of occupied cells in a neighborhood of the contact point. More... | |