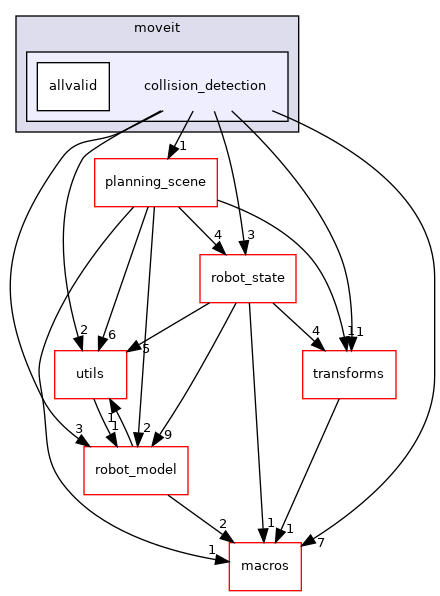
Directory dependency graph for collision_detection:
Directories | |
| directory | allvalid |
Files | |
| file | collision_common.h [code] |
| file | collision_detector_allocator.h [code] |
| file | collision_env.h [code] |
| file | collision_matrix.h [code] |
| file | collision_octomap_filter.h [code] |
| file | collision_plugin.h [code] |
| file | collision_plugin_cache.h [code] |
| file | collision_tools.h [code] |
| file | occupancy_map.h [code] |
| file | test_collision_common_panda.h [code] |
| file | test_collision_common_pr2.h [code] |
| file | world.h [code] |
| file | world_diff.h [code] |