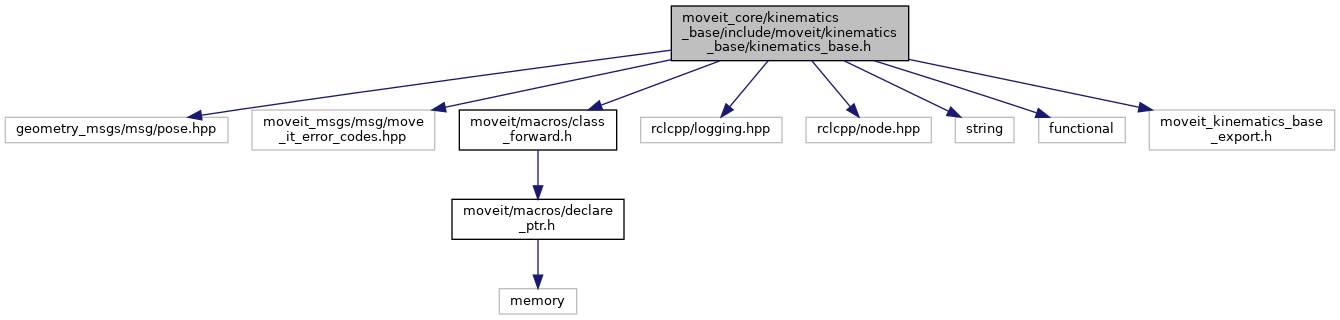
#include <geometry_msgs/msg/pose.hpp>
#include <moveit_msgs/msg/move_it_error_codes.hpp>
#include <moveit/macros/class_forward.h>
#include <rclcpp/logging.hpp>
#include <rclcpp/node.hpp>
#include <string>
#include <functional>
#include <moveit_kinematics_base_export.h>
Go to the source code of this file.
|
| enum | kinematics::DiscretizationMethods::DiscretizationMethod {
kinematics::DiscretizationMethods::NO_DISCRETIZATION = 1
, kinematics::DiscretizationMethods::ALL_DISCRETIZED
, kinematics::DiscretizationMethods::SOME_DISCRETIZED
, kinematics::DiscretizationMethods::ALL_RANDOM_SAMPLED
,
kinematics::DiscretizationMethods::SOME_RANDOM_SAMPLED
} |
| |
| enum | kinematics::KinematicErrors::KinematicError {
kinematics::KinematicErrors::OK = 1
, kinematics::KinematicErrors::UNSUPORTED_DISCRETIZATION_REQUESTED
, kinematics::KinematicErrors::DISCRETIZATION_NOT_INITIALIZED
, kinematics::KinematicErrors::MULTIPLE_TIPS_NOT_SUPPORTED
,
kinematics::KinematicErrors::EMPTY_TIP_POSES
, kinematics::KinematicErrors::IK_SEED_OUTSIDE_LIMITS
, kinematics::KinematicErrors::SOLVER_NOT_ACTIVE
, kinematics::KinematicErrors::NO_SOLUTION
} |
| |