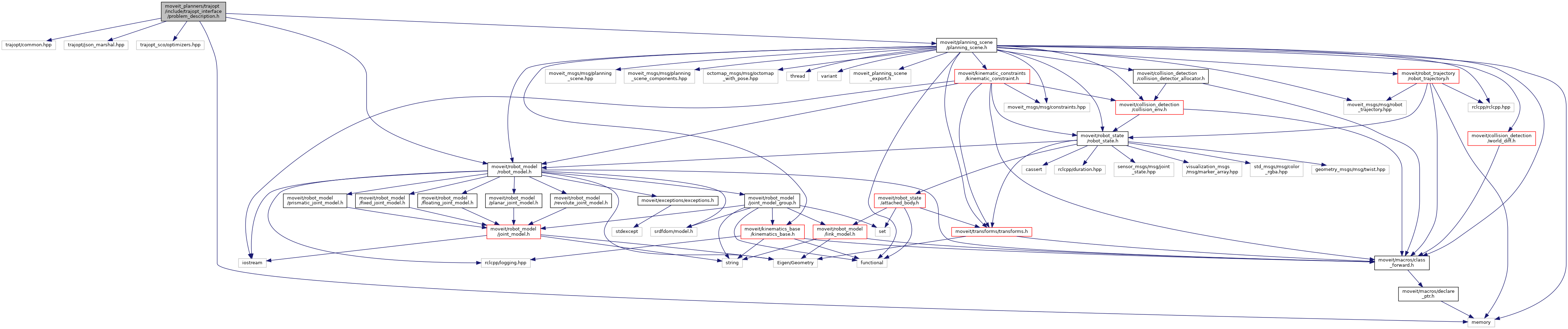
#include <trajopt/common.hpp>#include <trajopt/json_marshal.hpp>#include <trajopt_sco/optimizers.hpp>#include <moveit/robot_model/robot_model.h>#include <moveit/planning_scene/planning_scene.h>#include <memory>
Include dependency graph for problem_description.h:
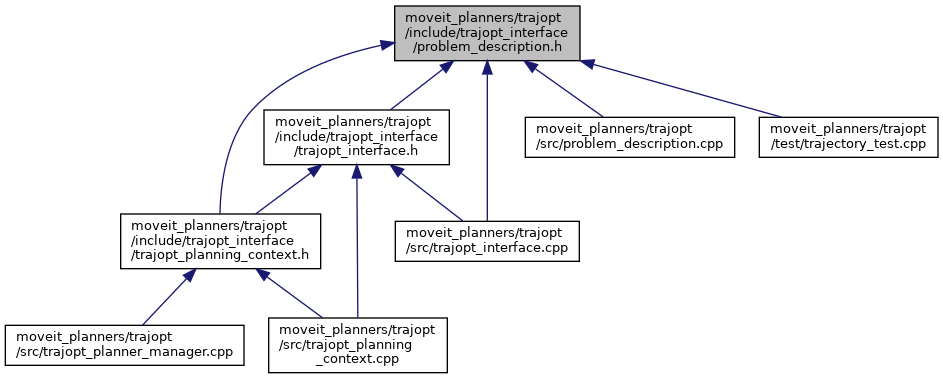
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | trajopt_interface::BasicInfo |
| struct | trajopt_interface::InitInfo |
| struct | trajopt_interface::TermInfo |
| struct | trajopt_interface::ProblemInfo |
| class | trajopt_interface::TrajOptProblem |
| struct | trajopt_interface::CartPoseTermInfo |
| This term is used when the goal frame is fixed in cartesian space. More... | |
| struct | trajopt_interface::JointPoseTermInfo |
| Joint space position cost Position operates on a single point (unlike velocity, etc). This is b/c the primary usecase is joint-space position waypoints. More... | |
| struct | trajopt_interface::JointVelTermInfo |
Namespaces | |
| trajopt_interface | |
Enumerations | |
| enum | trajopt_interface::TermType { trajopt_interface::TT_COST = 0x1 , trajopt_interface::TT_CNT = 0x2 , trajopt_interface::TT_USE_TIME = 0x4 } |
Functions | |
| trajopt_interface::MOVEIT_CLASS_FORWARD (TermInfo) | |
| trajopt_interface::MOVEIT_CLASS_FORWARD (TrajOptProblem) | |
| trajopt_interface::MOVEIT_CLASS_FORWARD (JointPoseTermInfo) | |
| trajopt_interface::MOVEIT_CLASS_FORWARD (CartPoseTermInfo) | |
| trajopt_interface::MOVEIT_CLASS_FORWARD (JointVelTermInfo) | |
| TrajOptProblemPtr | trajopt_interface::ConstructProblem (const ProblemInfo &) |
| void | trajopt_interface::generateInitialTrajectory (const ProblemInfo &pci, const std::vector< double > ¤t_joint_values, trajopt::TrajArray &init_traj) |