#include <kinematic_options.h>
Public Types | |
| enum | OptionBitmask { TIMEOUT = 0x00000001 , STATE_VALIDITY_CALLBACK = 0x00000002 , LOCK_REDUNDANT_JOINTS = 0x00000004 , RETURN_APPROXIMATE_SOLUTION = 0x00000008 , DISCRETIZATION_METHOD = 0x00000010 , ALL_QUERY_OPTIONS = LOCK_REDUNDANT_JOINTS | RETURN_APPROXIMATE_SOLUTION | DISCRETIZATION_METHOD , ALL = 0x7fffffff } |
Public Member Functions | |
| KinematicOptions () | |
| Constructor - set all options to reasonable default values. More... | |
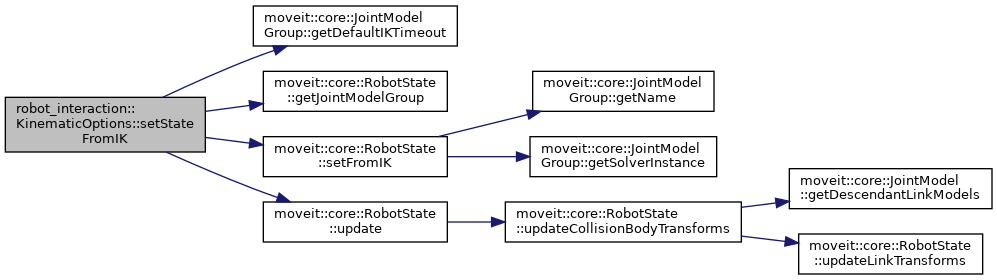
| bool | setStateFromIK (moveit::core::RobotState &state, const std::string &group, const std::string &tip, const geometry_msgs::msg::Pose &pose) const |
| void | setOptions (const KinematicOptions &source, OptionBitmask fields=ALL) |
Public Attributes | |
| double | timeout_seconds_ |
| max time an IK attempt can take before we give up. More... | |
| moveit::core::GroupStateValidityCallbackFn | state_validity_callback_ |
| This is called to determine if the state is valid. More... | |
| kinematics::KinematicsQueryOptions | options_ |
| other options More... | |
Detailed Description
Definition at line 48 of file kinematic_options.h.
Member Enumeration Documentation
◆ OptionBitmask
Bits corresponding to each member. NOTE: when adding fields to this structure also add the field to this enum and to the setOptions() method.
| Enumerator | |
|---|---|
| TIMEOUT | |
| STATE_VALIDITY_CALLBACK | |
| LOCK_REDUNDANT_JOINTS | |
| RETURN_APPROXIMATE_SOLUTION | |
| DISCRETIZATION_METHOD | |
| ALL_QUERY_OPTIONS | |
| ALL | |
Definition at line 56 of file kinematic_options.h.
Constructor & Destructor Documentation
◆ KinematicOptions()
| robot_interaction::KinematicOptions::KinematicOptions | ( | ) |
Constructor - set all options to reasonable default values.
Definition at line 42 of file kinematic_options.cpp.
Member Function Documentation
◆ setOptions()
| void robot_interaction::KinematicOptions::setOptions | ( | const KinematicOptions & | source, |
| OptionBitmask | fields = ALL |
||
| ) |
Copy a subset of source to this. For each bit set in fields the corresponding member is copied from source to this.
Definition at line 66 of file kinematic_options.cpp.

◆ setStateFromIK()
| bool robot_interaction::KinematicOptions::setStateFromIK | ( | moveit::core::RobotState & | state, |
| const std::string & | group, | ||
| const std::string & | tip, | ||
| const geometry_msgs::msg::Pose & | pose | ||
| ) | const |
Set state using inverse kinematics
- Parameters
-
state the state to set group name of group whose joints can move tip link that will be posed pose desired pose of tip link result true if IK succeeded.
Definition at line 48 of file kinematic_options.cpp.
Member Data Documentation
◆ options_
| kinematics::KinematicsQueryOptions robot_interaction::KinematicOptions::options_ |
other options
Definition at line 88 of file kinematic_options.h.
◆ state_validity_callback_
| moveit::core::GroupStateValidityCallbackFn robot_interaction::KinematicOptions::state_validity_callback_ |
This is called to determine if the state is valid.
Definition at line 85 of file kinematic_options.h.
◆ timeout_seconds_
| double robot_interaction::KinematicOptions::timeout_seconds_ |
max time an IK attempt can take before we give up.
Definition at line 82 of file kinematic_options.h.
The documentation for this struct was generated from the following files:
- moveit_ros/robot_interaction/include/moveit/robot_interaction/kinematic_options.h
- moveit_ros/robot_interaction/src/kinematic_options.cpp