#include <gtest/gtest.h>#include <map>#include <math.h>#include <string>#include <vector>#include <Eigen/Geometry>#include <kdl/frames.hpp>#include <kdl/path_roundedcomposite.hpp>#include <kdl/rotational_interpolation_sa.hpp>#include <kdl/trajectory.hpp>#include <kdl/trajectory_segment.hpp>#include <kdl/velocityprofile_trap.hpp>#include <moveit/planning_scene/planning_scene.h>#include <moveit/robot_model/joint_model_group.h>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_model_loader/robot_model_loader.h>#include <tf2_eigen/tf2_eigen.hpp>#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>#include <pilz_industrial_motion_planner/cartesian_trajectory.h>#include <pilz_industrial_motion_planner/cartesian_trajectory_point.h>#include <pilz_industrial_motion_planner/limits_container.h>#include <pilz_industrial_motion_planner/trajectory_functions.h>#include "test_utils.h"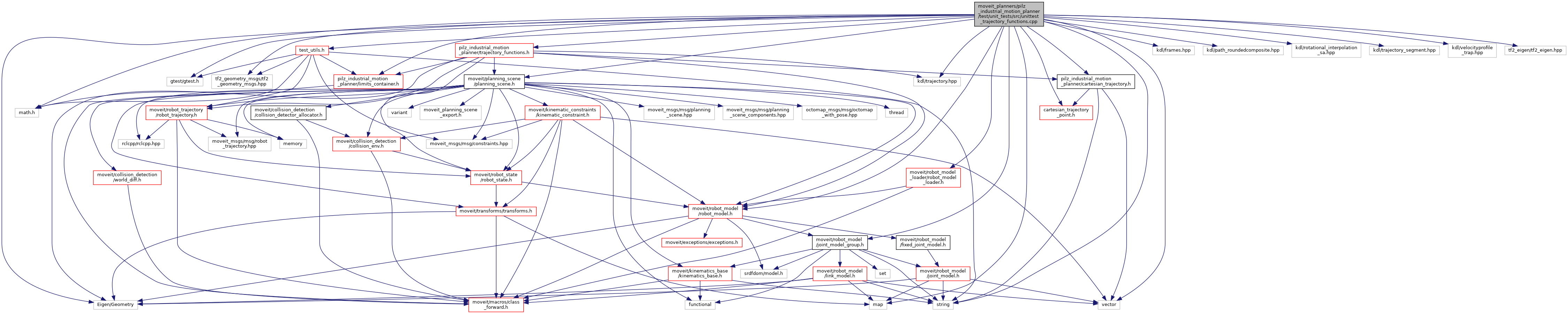
Go to the source code of this file.
Classes | |
| class | TrajectoryFunctionsTestBase |
| test fixtures base class More... | |
| class | TrajectoryFunctionsTestFlangeAndGripper |
| Parametrized class for tests with and without gripper. More... | |
Macros | |
| #define | _USE_MATH_DEFINES |
Functions | |
| const std::string | PARAM_PLANNING_GROUP_NAME ("planning_group") |
| const std::string | GROUP_TIP_LINK_NAME ("group_tip_link") |
| const std::string | ROBOT_TCP_LINK_NAME ("tcp_link") |
| const std::string | IK_FAST_LINK_NAME ("ik_fast_link") |
| const std::string | RANDOM_TEST_NUMBER ("random_test_number") |
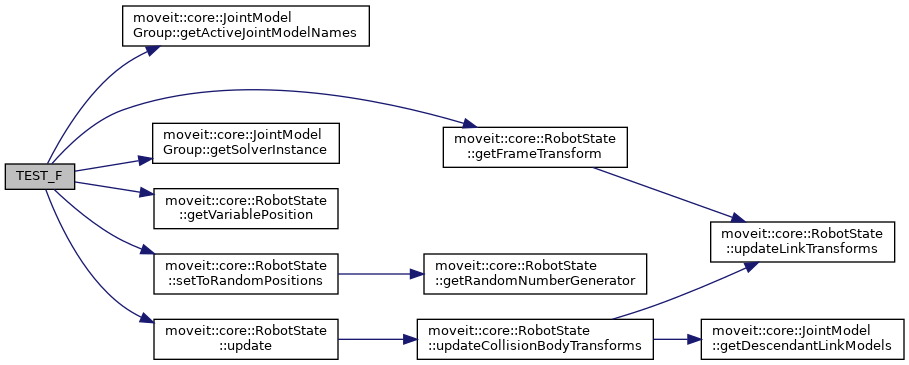
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, TipLinkFK) | |
| Test the forward kinematics function with simple robot poses for robot tip link using robot model without gripper. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testIKSolver) | |
| Test the inverse kinematics directly through ikfast solver. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testIKRobotState) | |
| Test the inverse kinematics using RobotState class (setFromIK) using robot model. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testIKRobotStateWithIdentityCollisionObject) | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testIKRobotStateWithTransformedCollisionObject) | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testIKRobotStateWithIdentitySubframe) | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testIKRobotStateWithTransformedSubframe) | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testComputePoseIK) | |
| Test the wrapper function to compute inverse kinematics using robot model. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testComputePoseIKInvalidGroupName) | |
| Test computePoseIK for invalid group_name. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testComputePoseIKInvalidLinkName) | |
| Test computePoseIK for invalid link_name. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testComputePoseIKInvalidFrameId) | |
| Test computePoseIK for invalid frame_id. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testComputePoseIKSelfCollisionForInvalidPose) | |
| Test if self collision is considered by using a pose that always has self collision. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testVerifySampleJointLimitsWithSmallDuration) | |
| Check that function VerifySampleJointLimits() returns 'false' in case of very small sample duration. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testVerifySampleJointLimitsVelocityViolation) | |
| Check that function VerifySampleJointLimits() returns 'false' in case of a velocity violation. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testVerifySampleJointLimitsAccelerationViolation) | |
| Check that function VerifySampleJointLimits() returns 'false' in case of a acceleration violation. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testVerifySampleJointLimitsDecelerationViolation) | |
| Check that function VerifySampleJointLimits() returns 'false' in case of a deceleration violation. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testGenerateJointTrajectoryWithInvalidCartesianTrajectory) | |
| Check that function generateJointTrajectory() returns 'false' if a joint trajectory cannot be computed from a cartesian trajectory. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testDetermineAndCheckSamplingTimeInvalidVectorSize) | |
| Check that function determineAndCheckSamplingTime() returns 'false' if both of the needed vectors have an incorrect vector size. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testDetermineAndCheckSamplingTimeCorrectSamplingTime) | |
| Check that function determineAndCheckSamplingTime() returns 'true' if sampling time is correct. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testDetermineAndCheckSamplingTimeViolateSamplingTime) | |
| Check that function determineAndCheckSamplingTime() returns 'false' if sampling time is violated. More... | |
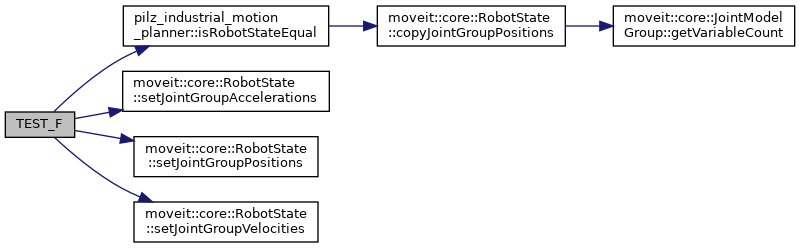
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testIsRobotStateEqualPositionUnequal) | |
| Check that function isRobotStateEqual() returns 'false' if the positions of the robot states are not equal. More... | |
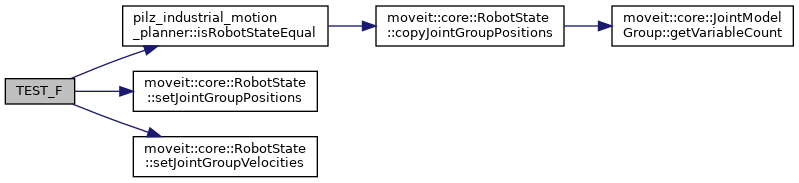
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testIsRobotStateEqualVelocityUnequal) | |
| Check that function isRobotStateEqual() returns 'false' if the velocity of the robot states are not equal. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testIsRobotStateEqualAccelerationUnequal) | |
| Check that function isRobotStateEqual() returns 'false' if the acceleration of the robot states are not equal. More... | |
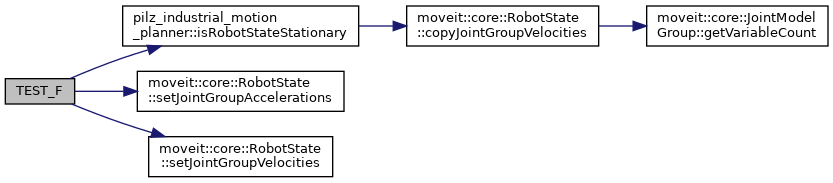
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testIsRobotStateStationaryVelocityUnequal) | |
| Check that function isRobotStateStationary() returns 'false' if the joint velocities are not equal to zero. More... | |
| TEST_F (TrajectoryFunctionsTestFlangeAndGripper, testIsRobotStateStationaryAccelerationUnequal) | |
| Check that function isRobotStateStationary() returns 'false' if the joint acceleration are not equal to zero. More... | |
| int | main (int argc, char **argv) |
Macro Definition Documentation
◆ _USE_MATH_DEFINES
| #define _USE_MATH_DEFINES |
Definition at line 62 of file unittest_trajectory_functions.cpp.
Function Documentation
◆ GROUP_TIP_LINK_NAME()
| const std::string GROUP_TIP_LINK_NAME | ( | "group_tip_link" | ) |
◆ IK_FAST_LINK_NAME()
| const std::string IK_FAST_LINK_NAME | ( | "ik_fast_link" | ) |
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 1156 of file unittest_trajectory_functions.cpp.
◆ PARAM_PLANNING_GROUP_NAME()
| const std::string PARAM_PLANNING_GROUP_NAME | ( | "planning_group" | ) |
◆ RANDOM_TEST_NUMBER()
| const std::string RANDOM_TEST_NUMBER | ( | "random_test_number" | ) |
◆ ROBOT_TCP_LINK_NAME()
| const std::string ROBOT_TCP_LINK_NAME | ( | "tcp_link" | ) |
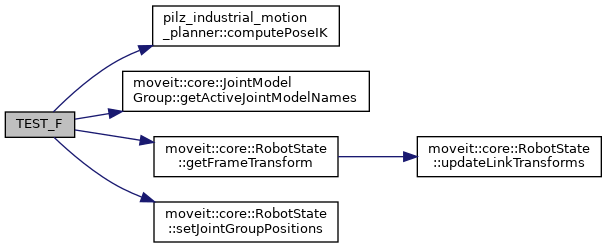
◆ TEST_F() [1/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testComputePoseIK | |||
| ) |
Test the wrapper function to compute inverse kinematics using robot model.
Definition at line 516 of file unittest_trajectory_functions.cpp.
◆ TEST_F() [2/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testComputePoseIKInvalidFrameId | |||
| ) |
Test computePoseIK for invalid frame_id.
Currently only robot_model_->getModelFrame() == frame_id
Definition at line 598 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [3/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testComputePoseIKInvalidGroupName | |||
| ) |
Test computePoseIK for invalid group_name.
Definition at line 564 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [4/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testComputePoseIKInvalidLinkName | |||
| ) |
Test computePoseIK for invalid link_name.
Definition at line 580 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [5/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testComputePoseIKSelfCollisionForInvalidPose | |||
| ) |
Test if self collision is considered by using a pose that always has self collision.
Definition at line 687 of file unittest_trajectory_functions.cpp.
◆ TEST_F() [6/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testDetermineAndCheckSamplingTimeCorrectSamplingTime | |||
| ) |
Check that function determineAndCheckSamplingTime() returns 'true' if sampling time is correct.
Test Sequence:
- Call function with trajectories which do NOT violate sampling time.
Expected Results:
- Function returns 'true'.
Definition at line 951 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [7/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testDetermineAndCheckSamplingTimeInvalidVectorSize | |||
| ) |
Check that function determineAndCheckSamplingTime() returns 'false' if both of the needed vectors have an incorrect vector size.
Test Sequence:
- Call function with vectors of incorrect size.
Expected Results:
- Function returns 'false'.
Definition at line 923 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [8/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testDetermineAndCheckSamplingTimeViolateSamplingTime | |||
| ) |
Check that function determineAndCheckSamplingTime() returns 'false' if sampling time is violated.
Test Sequence:
- Call function with trajectories which violate sampling time.
Expected Results:
- Function returns 'false'.
Definition at line 985 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [9/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testGenerateJointTrajectoryWithInvalidCartesianTrajectory | |||
| ) |
Check that function generateJointTrajectory() returns 'false' if a joint trajectory cannot be computed from a cartesian trajectory.
Please note: Both function variants are tested in this test.
Test Sequence:
- Call function with a cartesian trajectory which cannot be transformed into a joint trajectory by using an invalid group_name.
Expected Results:
- Function returns 'false'.
Definition at line 874 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [10/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testIKRobotState | |||
| ) |
Test the inverse kinematics using RobotState class (setFromIK) using robot model.
Definition at line 344 of file unittest_trajectory_functions.cpp.
◆ TEST_F() [11/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testIKRobotStateWithIdentityCollisionObject | |||
| ) |
Definition at line 398 of file unittest_trajectory_functions.cpp.
◆ TEST_F() [12/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testIKRobotStateWithIdentitySubframe | |||
| ) |
Definition at line 452 of file unittest_trajectory_functions.cpp.
◆ TEST_F() [13/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testIKRobotStateWithTransformedCollisionObject | |||
| ) |
Definition at line 424 of file unittest_trajectory_functions.cpp.
◆ TEST_F() [14/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testIKRobotStateWithTransformedSubframe | |||
| ) |
Definition at line 479 of file unittest_trajectory_functions.cpp.
◆ TEST_F() [15/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testIKSolver | |||
| ) |
Test the inverse kinematics directly through ikfast solver.
Definition at line 285 of file unittest_trajectory_functions.cpp.
◆ TEST_F() [16/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testIsRobotStateEqualAccelerationUnequal | |||
| ) |
Check that function isRobotStateEqual() returns 'false' if the acceleration of the robot states are not equal.
Test Sequence:
- Call function with robot states with different acceleration.
Expected Results:
- Function returns 'false'.
Definition at line 1081 of file unittest_trajectory_functions.cpp.
◆ TEST_F() [17/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testIsRobotStateEqualPositionUnequal | |||
| ) |
Check that function isRobotStateEqual() returns 'false' if the positions of the robot states are not equal.
Test Sequence:
- Call function with robot states with different positions.
Expected Results:
- Function returns 'false'.
Definition at line 1024 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [18/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testIsRobotStateEqualVelocityUnequal | |||
| ) |
Check that function isRobotStateEqual() returns 'false' if the velocity of the robot states are not equal.
Test Sequence:
- Call function with robot states with different velocities.
Expected Results:
- Function returns 'false'.
Definition at line 1050 of file unittest_trajectory_functions.cpp.
◆ TEST_F() [19/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testIsRobotStateStationaryAccelerationUnequal | |||
| ) |
Check that function isRobotStateStationary() returns 'false' if the joint acceleration are not equal to zero.
Test Sequence:
- Call function with robot state with joint acceleration != 0.
Expected Results:
- Function returns 'false'.
Definition at line 1140 of file unittest_trajectory_functions.cpp.
◆ TEST_F() [20/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testIsRobotStateStationaryVelocityUnequal | |||
| ) |
Check that function isRobotStateStationary() returns 'false' if the joint velocities are not equal to zero.
Test Sequence:
- Call function with robot state with joint velocities != 0.
Expected Results:
- Function returns 'false'.
Definition at line 1117 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [21/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testVerifySampleJointLimitsAccelerationViolation | |||
| ) |
Check that function VerifySampleJointLimits() returns 'false' in case of a acceleration violation.
Test Sequence:
- Call function with a acceleration violation.
Expected Results:
- Function returns 'false'.
Definition at line 784 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [22/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testVerifySampleJointLimitsDecelerationViolation | |||
| ) |
Check that function VerifySampleJointLimits() returns 'false' in case of a deceleration violation.
Test Sequence:
- Call function with a deceleration violation.
Expected Results:
- Function returns 'false'.
Definition at line 827 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [23/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testVerifySampleJointLimitsVelocityViolation | |||
| ) |
Check that function VerifySampleJointLimits() returns 'false' in case of a velocity violation.
Test Sequence:
- Call function with a velocity violation.
Expected Results:
- Function returns 'false'.
Definition at line 751 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [24/25]
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| testVerifySampleJointLimitsWithSmallDuration | |||
| ) |
Check that function VerifySampleJointLimits() returns 'false' in case of very small sample duration.
Test Sequence:
- Call function with very small sample duration.
Expected Results:
- Function returns 'false'.
Definition at line 729 of file unittest_trajectory_functions.cpp.

◆ TEST_F() [25/25]
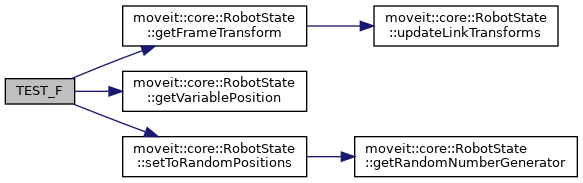
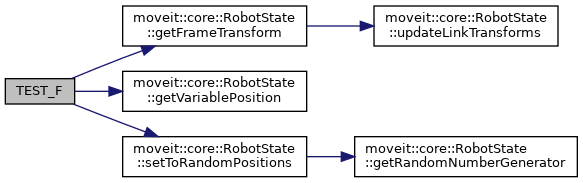
| TEST_F | ( | TrajectoryFunctionsTestFlangeAndGripper | , |
| TipLinkFK | |||
| ) |
Test the forward kinematics function with simple robot poses for robot tip link using robot model without gripper.
Definition at line 255 of file unittest_trajectory_functions.cpp.
