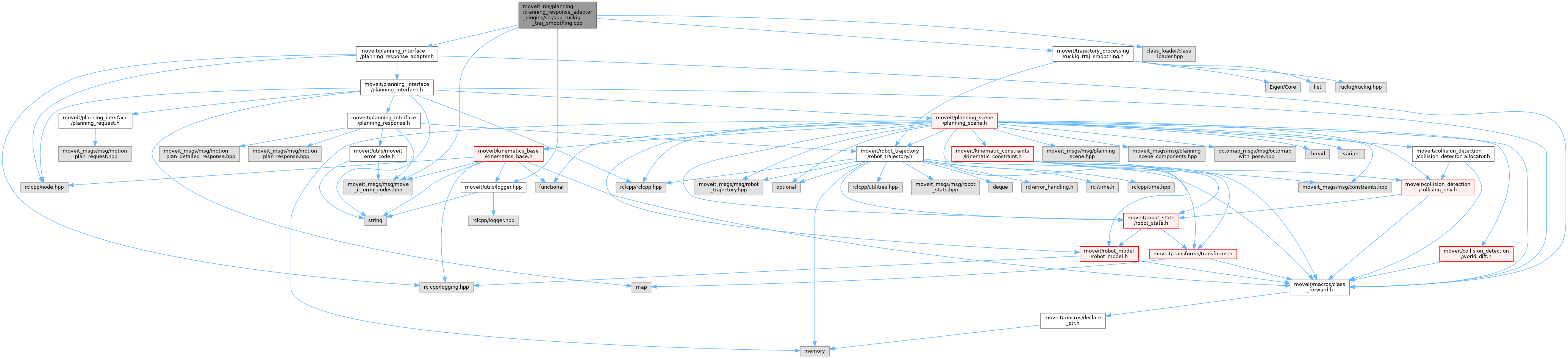
#include <moveit/utils/logger.hpp>#include <moveit/planning_interface/planning_response_adapter.hpp>#include <moveit/trajectory_processing/ruckig_traj_smoothing.hpp>#include <class_loader/class_loader.hpp>#include <moveit_msgs/msg/move_it_error_codes.hpp>
Include dependency graph for add_ruckig_traj_smoothing.cpp:
Go to the source code of this file.
Classes | |
| class | default_planning_response_adapters::AddRuckigTrajectorySmoothing |
| Use ruckig (https://github.com/pantor/ruckig) to adapt the trajectory to be jerk-constrained and time-optimal. More... | |
Namespaces | |
| namespace | default_planning_response_adapters |