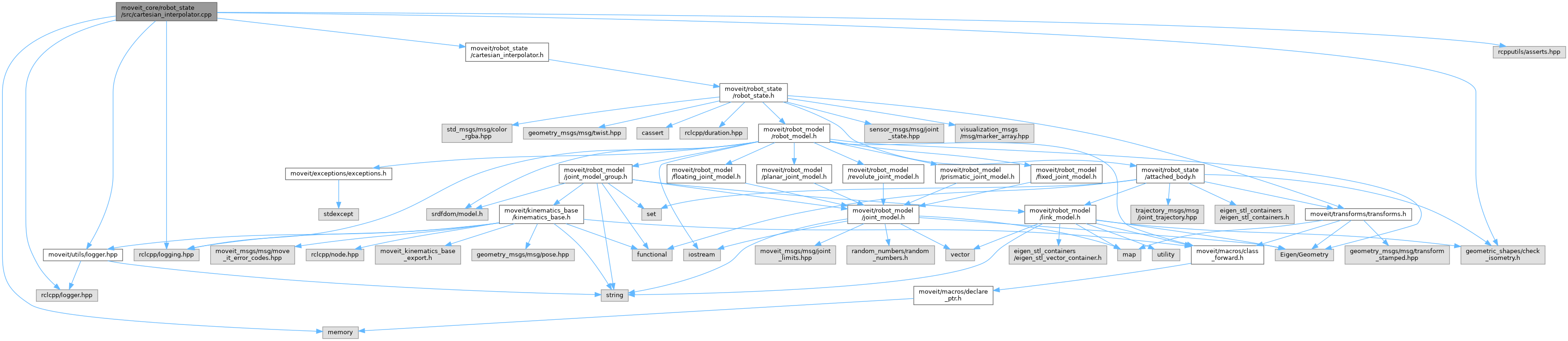
#include <memory>#include <moveit/robot_state/cartesian_interpolator.hpp>#include <geometric_shapes/check_isometry.h>#include <rclcpp/logger.hpp>#include <rclcpp/logging.hpp>#include <rcpputils/asserts.hpp>#include <moveit/utils/logger.hpp>
Include dependency graph for cartesian_interpolator.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit |
| Main namespace for MoveIt. | |
| namespace | moveit::core |
| Core components of MoveIt. | |
Functions | |
| std::optional< int > | moveit::core::hasJointSpaceJump (const std::vector< moveit::core::RobotStatePtr > &waypoints, const moveit::core::JointModelGroup &group, const moveit::core::JumpThreshold &jump_threshold) |
| Checks if a joint-space path has a jump larger than the given threshold. | |