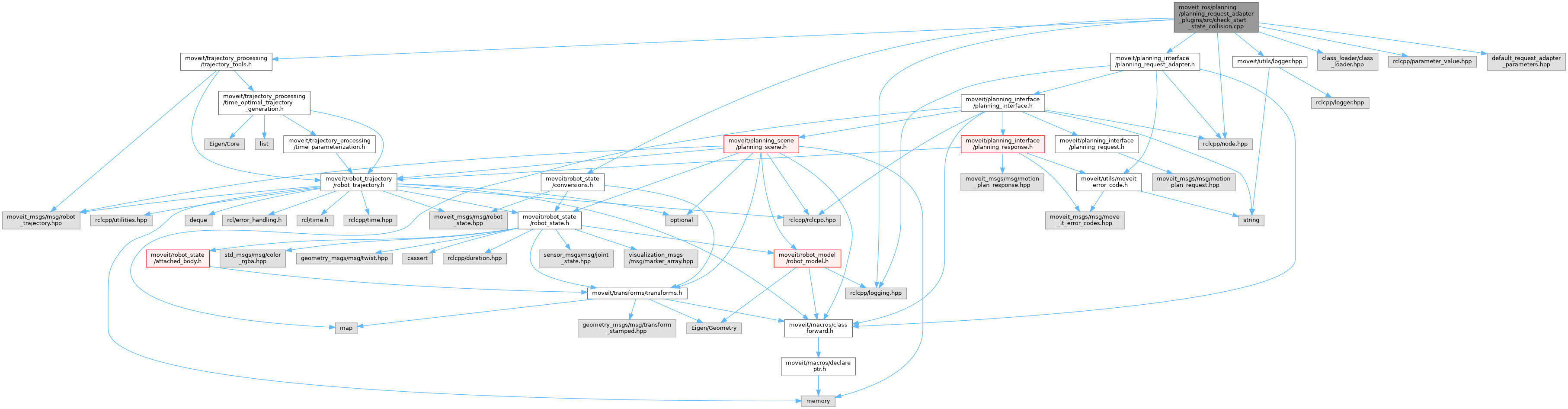
#include <moveit/planning_interface/planning_request_adapter.hpp>#include <moveit/robot_state/conversions.hpp>#include <moveit/trajectory_processing/trajectory_tools.hpp>#include <class_loader/class_loader.hpp>#include <rclcpp/logging.hpp>#include <rclcpp/node.hpp>#include <rclcpp/parameter_value.hpp>#include <moveit/utils/logger.hpp>#include <moveit_ros_planning/default_request_adapter_parameters.hpp>
Include dependency graph for check_start_state_collision.cpp:
Go to the source code of this file.
Classes | |
| class | default_planning_request_adapters::CheckStartStateCollision |
| This adapter checks if the start state is in collision. More... | |
Namespaces | |
| namespace | default_planning_request_adapters |