A class that contains many different constraints, and can check RobotState *versus the full set. A set is satisfied if and only if all constraints are satisfied. More...
#include <kinematic_constraint.hpp>
Public Member Functions | |
| KinematicConstraintSet (const moveit::core::RobotModelConstPtr &model) | |
| Constructor. | |
| ~KinematicConstraintSet () | |
| void | clear () |
| Clear the stored constraints. | |
| bool | add (const moveit_msgs::msg::Constraints &c, const moveit::core::Transforms &tf) |
| Add all known constraints. | |
| bool | add (const std::vector< moveit_msgs::msg::JointConstraint > &jc) |
| Add a vector of joint constraints. | |
| bool | add (const std::vector< moveit_msgs::msg::PositionConstraint > &pc, const moveit::core::Transforms &tf) |
| Add a vector of position constraints. | |
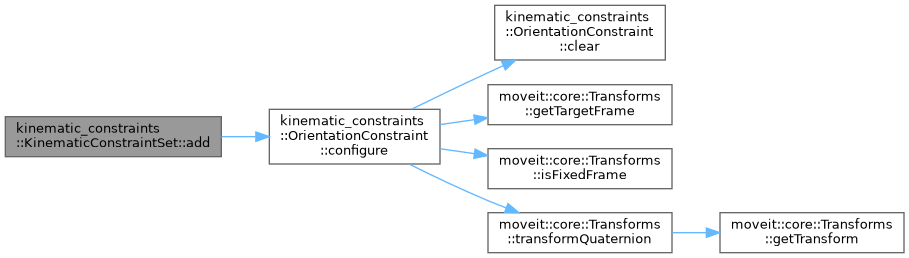
| bool | add (const std::vector< moveit_msgs::msg::OrientationConstraint > &oc, const moveit::core::Transforms &tf) |
| Add a vector of orientation constraints. | |
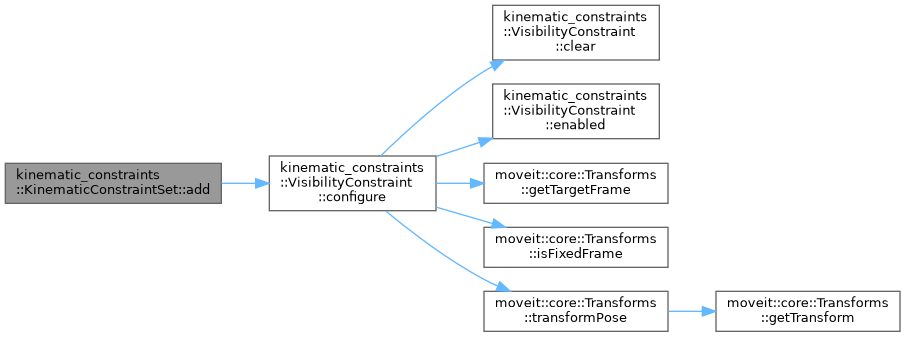
| bool | add (const std::vector< moveit_msgs::msg::VisibilityConstraint > &vc, const moveit::core::Transforms &tf) |
| Add a vector of visibility constraints. | |
| ConstraintEvaluationResult | decide (const moveit::core::RobotState &state, bool verbose=false) const |
| Determines whether all constraints are satisfied by state, returning a single evaluation result. | |
| ConstraintEvaluationResult | decide (const moveit::core::RobotState &state, std::vector< ConstraintEvaluationResult > &results, bool verbose=false) const |
| Determines whether all constraints are satisfied by state, returning a vector of results through a parameter in addition to a summed result. | |
| bool | equal (const KinematicConstraintSet &other, double margin) const |
| Whether or not another KinematicConstraintSet is equal to this one. | |
| void | print (std::ostream &out=std::cout) const |
| Print the constraint data. | |
| const std::vector< moveit_msgs::msg::PositionConstraint > & | getPositionConstraints () const |
| Get all position constraints in the set. | |
| const std::vector< moveit_msgs::msg::OrientationConstraint > & | getOrientationConstraints () const |
| Get all orientation constraints in the set. | |
| const std::vector< moveit_msgs::msg::JointConstraint > & | getJointConstraints () const |
| Get all joint constraints in the set. | |
| const std::vector< moveit_msgs::msg::VisibilityConstraint > & | getVisibilityConstraints () const |
| Get all visibility constraints in the set. | |
| const moveit_msgs::msg::Constraints & | getAllConstraints () const |
| Get all constraints in the set. | |
| bool | empty () const |
| Returns whether or not there are any constraints in the set. | |
Protected Attributes | |
| moveit::core::RobotModelConstPtr | robot_model_ |
| The kinematic model used for by the Set. | |
| std::vector< KinematicConstraintPtr > | kinematic_constraints_ |
| Shared pointers to all the member constraints. | |
| std::vector< moveit_msgs::msg::JointConstraint > | joint_constraints_ |
| Messages corresponding to all internal joint constraints. | |
| std::vector< moveit_msgs::msg::PositionConstraint > | position_constraints_ |
| Messages corresponding to all internal position constraints. | |
| std::vector< moveit_msgs::msg::OrientationConstraint > | orientation_constraints_ |
| Messages corresponding to all internal orientation constraints. | |
| std::vector< moveit_msgs::msg::VisibilityConstraint > | visibility_constraints_ |
| Messages corresponding to all internal visibility constraints. | |
| moveit_msgs::msg::Constraints | all_constraints_ |
| Messages corresponding to all internal constraints. | |
Detailed Description
A class that contains many different constraints, and can check RobotState *versus the full set. A set is satisfied if and only if all constraints are satisfied.
The set may contain any number of different kinds of constraints. All constraints, including invalid ones, are stored internally.
Definition at line 895 of file kinematic_constraint.hpp.
Constructor & Destructor Documentation
◆ KinematicConstraintSet()
|
inline |
Constructor.
- Parameters
-
[in] model The kinematic model used for constraint evaluation
Definition at line 906 of file kinematic_constraint.hpp.
◆ ~KinematicConstraintSet()
|
inline |

Member Function Documentation
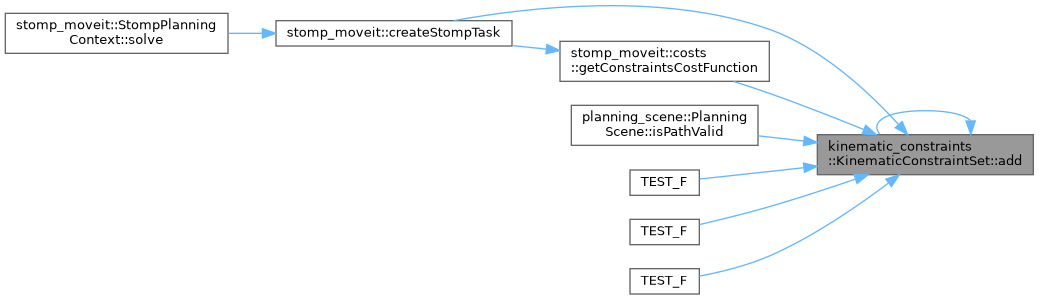
◆ add() [1/5]
| bool kinematic_constraints::KinematicConstraintSet::add | ( | const moveit_msgs::msg::Constraints & | c, |
| const moveit::core::Transforms & | tf | ||
| ) |
Add all known constraints.
- Parameters
-
[in] c A message potentially contain vectors of constraints of add types
- Returns
- Whether or not all constraints could be successfully configured given the contents of the message. The KinematicConstraintSet can still be used even if the addition returns false.
Definition at line 1294 of file kinematic_constraint.cpp.
◆ add() [2/5]
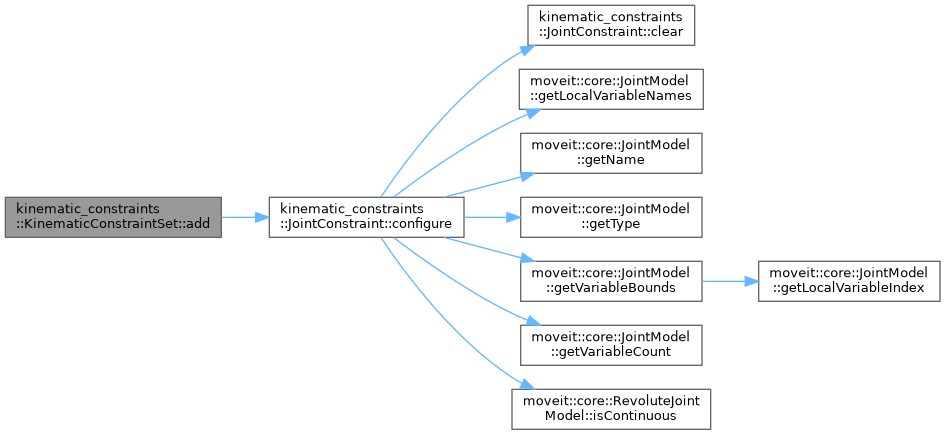
| bool kinematic_constraints::KinematicConstraintSet::add | ( | const std::vector< moveit_msgs::msg::JointConstraint > & | jc | ) |
Add a vector of joint constraints.
- Parameters
-
[in] jc A vector of joint constraints
- Returns
- Will return true only if all constraints are valid, and false otherwise
Definition at line 1231 of file kinematic_constraint.cpp.
◆ add() [3/5]
| bool kinematic_constraints::KinematicConstraintSet::add | ( | const std::vector< moveit_msgs::msg::OrientationConstraint > & | oc, |
| const moveit::core::Transforms & | tf | ||
| ) |
Add a vector of orientation constraints.
- Parameters
-
[in] oc A vector of orientation constraints
- Returns
- Will return true only if all constraints are valid, and false otherwise
Definition at line 1262 of file kinematic_constraint.cpp.
◆ add() [4/5]
| bool kinematic_constraints::KinematicConstraintSet::add | ( | const std::vector< moveit_msgs::msg::PositionConstraint > & | pc, |
| const moveit::core::Transforms & | tf | ||
| ) |
Add a vector of position constraints.
- Parameters
-
[in] pc A vector of position constraints
- Returns
- Will return true only if all constraints are valid, and false otherwise
Definition at line 1246 of file kinematic_constraint.cpp.

◆ add() [5/5]
| bool kinematic_constraints::KinematicConstraintSet::add | ( | const std::vector< moveit_msgs::msg::VisibilityConstraint > & | vc, |
| const moveit::core::Transforms & | tf | ||
| ) |
Add a vector of visibility constraints.
- Parameters
-
[in] vc A vector of visibility constraints
- Returns
- Will return true only if all constraints are valid, and false otherwise
Definition at line 1278 of file kinematic_constraint.cpp.
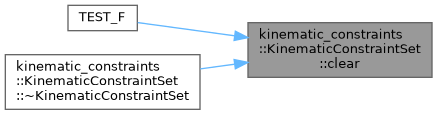
◆ clear()
| void kinematic_constraints::KinematicConstraintSet::clear | ( | ) |
Clear the stored constraints.
Definition at line 1221 of file kinematic_constraint.cpp.
◆ decide() [1/2]
| ConstraintEvaluationResult kinematic_constraints::KinematicConstraintSet::decide | ( | const moveit::core::RobotState & | state, |
| bool | verbose = false |
||
| ) | const |
Determines whether all constraints are satisfied by state, returning a single evaluation result.
- Parameters
-
[in] state The state to test [in] verbose Whether or not to make each constraint give debug output
- Returns
- A single constraint evaluation result, where it will report satisfied only if all constraints are satisfied, and with a distance that is the sum of all individual distances.
Definition at line 1303 of file kinematic_constraint.cpp.

◆ decide() [2/2]
| ConstraintEvaluationResult kinematic_constraints::KinematicConstraintSet::decide | ( | const moveit::core::RobotState & | state, |
| std::vector< ConstraintEvaluationResult > & | results, | ||
| bool | verbose = false |
||
| ) | const |
Determines whether all constraints are satisfied by state, returning a vector of results through a parameter in addition to a summed result.
- Parameters
-
[in] state The state to test [out] results The individual results from constraint evaluation on each constraint contained in the set. [in] verbose Whether to print the results of each constraint check.
- Returns
- A single constraint evaluation result, where it will report satisfied only if all constraints are satisfied, and with a distance that is the sum of all individual distances.
Definition at line 1316 of file kinematic_constraint.cpp.
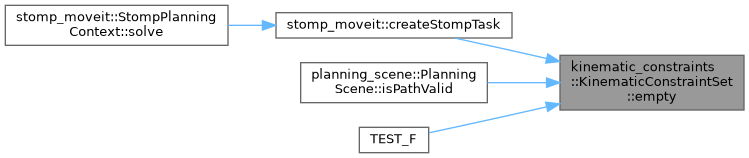
◆ empty()
|
inline |
Returns whether or not there are any constraints in the set.
- Returns
- True if there are no constraints, otherwise false.
Definition at line 1085 of file kinematic_constraint.hpp.
◆ equal()
| bool kinematic_constraints::KinematicConstraintSet::equal | ( | const KinematicConstraintSet & | other, |
| double | margin | ||
| ) | const |
Whether or not another KinematicConstraintSet is equal to this one.
Equality means that for each constraint in this set there is a constraint in the other set for which equal() is true with the given margin. Multiple constraints in this set can be matched to single constraints in the other set. Some constraints in the other set may not be matched to constraints in this set.
- Parameters
-
[in] other The other set against which to test [in] margin The margin to apply to all individual constraint equality tests
- Returns
- True if all constraints are matched, false otherwise
Definition at line 1339 of file kinematic_constraint.cpp.
◆ getAllConstraints()
|
inline |
Get all constraints in the set.
- Returns
- All constraints in a single message
Definition at line 1074 of file kinematic_constraint.hpp.

◆ getJointConstraints()
|
inline |
Get all joint constraints in the set.
- Returns
- All joint constraints
Definition at line 1052 of file kinematic_constraint.hpp.
◆ getOrientationConstraints()
|
inline |
Get all orientation constraints in the set.
- Returns
- All orientation constraints
Definition at line 1041 of file kinematic_constraint.hpp.
◆ getPositionConstraints()
|
inline |
Get all position constraints in the set.
- Returns
- All position constraints
Definition at line 1030 of file kinematic_constraint.hpp.
◆ getVisibilityConstraints()
|
inline |
Get all visibility constraints in the set.
- Returns
- All visibility constraints
Definition at line 1063 of file kinematic_constraint.hpp.
◆ print()
| void kinematic_constraints::KinematicConstraintSet::print | ( | std::ostream & | out = std::cout | ) | const |
Print the constraint data.
- Parameters
-
[in] out The file stream for printing
Definition at line 1332 of file kinematic_constraint.cpp.
Member Data Documentation
◆ all_constraints_
|
protected |
Messages corresponding to all internal constraints.
Definition at line 1105 of file kinematic_constraint.hpp.
◆ joint_constraints_
|
protected |
Messages corresponding to all internal joint constraints.
Definition at line 1095 of file kinematic_constraint.hpp.
◆ kinematic_constraints_
|
protected |
Shared pointers to all the member constraints.
Definition at line 1093 of file kinematic_constraint.hpp.
◆ orientation_constraints_
|
protected |
Messages corresponding to all internal orientation constraints.
Definition at line 1099 of file kinematic_constraint.hpp.
◆ position_constraints_
|
protected |
Messages corresponding to all internal position constraints.
Definition at line 1097 of file kinematic_constraint.hpp.
◆ robot_model_
|
protected |
The kinematic model used for by the Set.
Definition at line 1091 of file kinematic_constraint.hpp.
◆ visibility_constraints_
|
protected |
Messages corresponding to all internal visibility constraints.
Definition at line 1102 of file kinematic_constraint.hpp.
The documentation for this class was generated from the following files:
- moveit_core/kinematic_constraints/include/moveit/kinematic_constraints/kinematic_constraint.hpp
- moveit_core/kinematic_constraints/src/kinematic_constraint.cpp