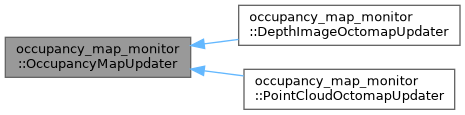
Base class for classes which update the occupancy map.
More...
#include <occupancy_map_updater.hpp>
Base class for classes which update the occupancy map.
Definition at line 65 of file occupancy_map_updater.hpp.
◆ OccupancyMapUpdater()
| occupancy_map_monitor::OccupancyMapUpdater::OccupancyMapUpdater |
( |
const std::string & |
type | ) |
|
◆ ~OccupancyMapUpdater()
| occupancy_map_monitor::OccupancyMapUpdater::~OccupancyMapUpdater |
( |
| ) |
|
|
virtualdefault |
◆ excludeShape()
| virtual ShapeHandle occupancy_map_monitor::OccupancyMapUpdater::excludeShape |
( |
const shapes::ShapeConstPtr & |
shape | ) |
|
|
pure virtual |
◆ forgetShape()
| virtual void occupancy_map_monitor::OccupancyMapUpdater::forgetShape |
( |
ShapeHandle |
handle | ) |
|
|
pure virtual |
◆ getType()
| const std::string & occupancy_map_monitor::OccupancyMapUpdater::getType |
( |
| ) |
const |
|
inline |
◆ initialize()
| virtual bool occupancy_map_monitor::OccupancyMapUpdater::initialize |
( |
const rclcpp::Node::SharedPtr & |
node | ) |
|
|
pure virtual |
◆ publishDebugInformation()
| void occupancy_map_monitor::OccupancyMapUpdater::publishDebugInformation |
( |
bool |
flag | ) |
|
|
inline |
◆ setMonitor()
◆ setParams()
| virtual bool occupancy_map_monitor::OccupancyMapUpdater::setParams |
( |
const std::string & |
name_space | ) |
|
|
pure virtual |
◆ setTransformCacheCallback()
| void occupancy_map_monitor::OccupancyMapUpdater::setTransformCacheCallback |
( |
const TransformCacheProvider & |
transform_callback | ) |
|
|
inline |
◆ start()
| virtual void occupancy_map_monitor::OccupancyMapUpdater::start |
( |
| ) |
|
|
pure virtual |
◆ stop()
| virtual void occupancy_map_monitor::OccupancyMapUpdater::stop |
( |
| ) |
|
|
pure virtual |
◆ updateTransformCache()
| bool occupancy_map_monitor::OccupancyMapUpdater::updateTransformCache |
( |
const std::string & |
target_frame, |
|
|
const rclcpp::Time & |
target_time |
|
) |
| |
|
protected |
◆ debug_info_
| bool occupancy_map_monitor::OccupancyMapUpdater::debug_info_ |
|
protected |
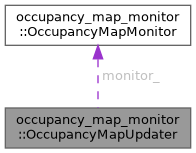
◆ monitor_
◆ transform_cache_
◆ transform_provider_callback_
◆ tree_
◆ type_
| std::string occupancy_map_monitor::OccupancyMapUpdater::type_ |
|
protected |
The documentation for this class was generated from the following files: