#include <pointcloud_octomap_updater.hpp>
Public Member Functions | |
| PointCloudOctomapUpdater () | |
| ~PointCloudOctomapUpdater () override | |
| bool | setParams (const std::string &name_space) override |
| Set updater params using struct that comes from parsing a yaml string. This must be called after setMonitor() | |
| bool | initialize (const rclcpp::Node::SharedPtr &node) override |
| Do any necessary setup (subscribe to ros topics, etc.). This call assumes setMonitor() and setParams() have been previously called. | |
| void | start () override |
| void | stop () override |
| ShapeHandle | excludeShape (const shapes::ShapeConstPtr &shape) override |
| void | forgetShape (ShapeHandle handle) override |
 Public Member Functions inherited from occupancy_map_monitor::OccupancyMapUpdater Public Member Functions inherited from occupancy_map_monitor::OccupancyMapUpdater | |
| OccupancyMapUpdater (const std::string &type) | |
| virtual | ~OccupancyMapUpdater () |
| void | setMonitor (OccupancyMapMonitor *monitor) |
| This is the first function to be called after construction. | |
| const std::string & | getType () const |
| void | setTransformCacheCallback (const TransformCacheProvider &transform_callback) |
| void | publishDebugInformation (bool flag) |
Protected Member Functions | |
| virtual void | updateMask (const sensor_msgs::msg::PointCloud2 &cloud, const Eigen::Vector3d &sensor_origin, std::vector< int > &mask) |
| Protected Member Functions inherited from occupancy_map_monitor::OccupancyMapUpdater | |
| bool | updateTransformCache (const std::string &target_frame, const rclcpp::Time &target_time) |
Additional Inherited Members | |
| Protected Attributes inherited from occupancy_map_monitor::OccupancyMapUpdater | |
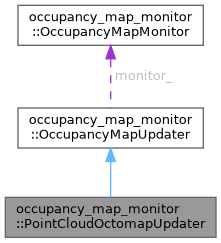
| OccupancyMapMonitor * | monitor_ |
| std::string | type_ |
| collision_detection::OccMapTreePtr | tree_ |
| TransformCacheProvider | transform_provider_callback_ |
| ShapeTransformCache | transform_cache_ |
| bool | debug_info_ |
Detailed Description
Definition at line 64 of file pointcloud_octomap_updater.hpp.
Constructor & Destructor Documentation
◆ PointCloudOctomapUpdater()
| occupancy_map_monitor::PointCloudOctomapUpdater::PointCloudOctomapUpdater | ( | ) |
Definition at line 69 of file pointcloud_octomap_updater.cpp.
◆ ~PointCloudOctomapUpdater()
|
inlineoverride |
Definition at line 68 of file pointcloud_octomap_updater.hpp.
Member Function Documentation
◆ excludeShape()
|
overridevirtual |
Implements occupancy_map_monitor::OccupancyMapUpdater.
Definition at line 195 of file pointcloud_octomap_updater.cpp.
◆ forgetShape()
|
overridevirtual |
Implements occupancy_map_monitor::OccupancyMapUpdater.
Definition at line 209 of file pointcloud_octomap_updater.cpp.
◆ initialize()
|
overridevirtual |
Do any necessary setup (subscribe to ros topics, etc.). This call assumes setMonitor() and setParams() have been previously called.
Implements occupancy_map_monitor::OccupancyMapUpdater.
Definition at line 118 of file pointcloud_octomap_updater.cpp.
◆ setParams()
|
overridevirtual |
Set updater params using struct that comes from parsing a yaml string. This must be called after setMonitor()
Implements occupancy_map_monitor::OccupancyMapUpdater.
Definition at line 82 of file pointcloud_octomap_updater.cpp.
◆ start()
|
overridevirtual |
Implements occupancy_map_monitor::OccupancyMapUpdater.
Definition at line 133 of file pointcloud_octomap_updater.cpp.

◆ stop()
|
overridevirtual |
Implements occupancy_map_monitor::OccupancyMapUpdater.
Definition at line 187 of file pointcloud_octomap_updater.cpp.
◆ updateMask()
|
protectedvirtual |
Definition at line 225 of file pointcloud_octomap_updater.cpp.
The documentation for this class was generated from the following files:
- moveit_ros/perception/pointcloud_octomap_updater/include/moveit/pointcloud_octomap_updater/pointcloud_octomap_updater.hpp
- moveit_ros/perception/pointcloud_octomap_updater/src/pointcloud_octomap_updater.cpp