#include <stomp_moveit_planning_context.hpp>
Public Member Functions | |
| StompPlanningContext (const std::string &name, const std::string &group_name, const stomp_moveit::Params ¶ms) | |
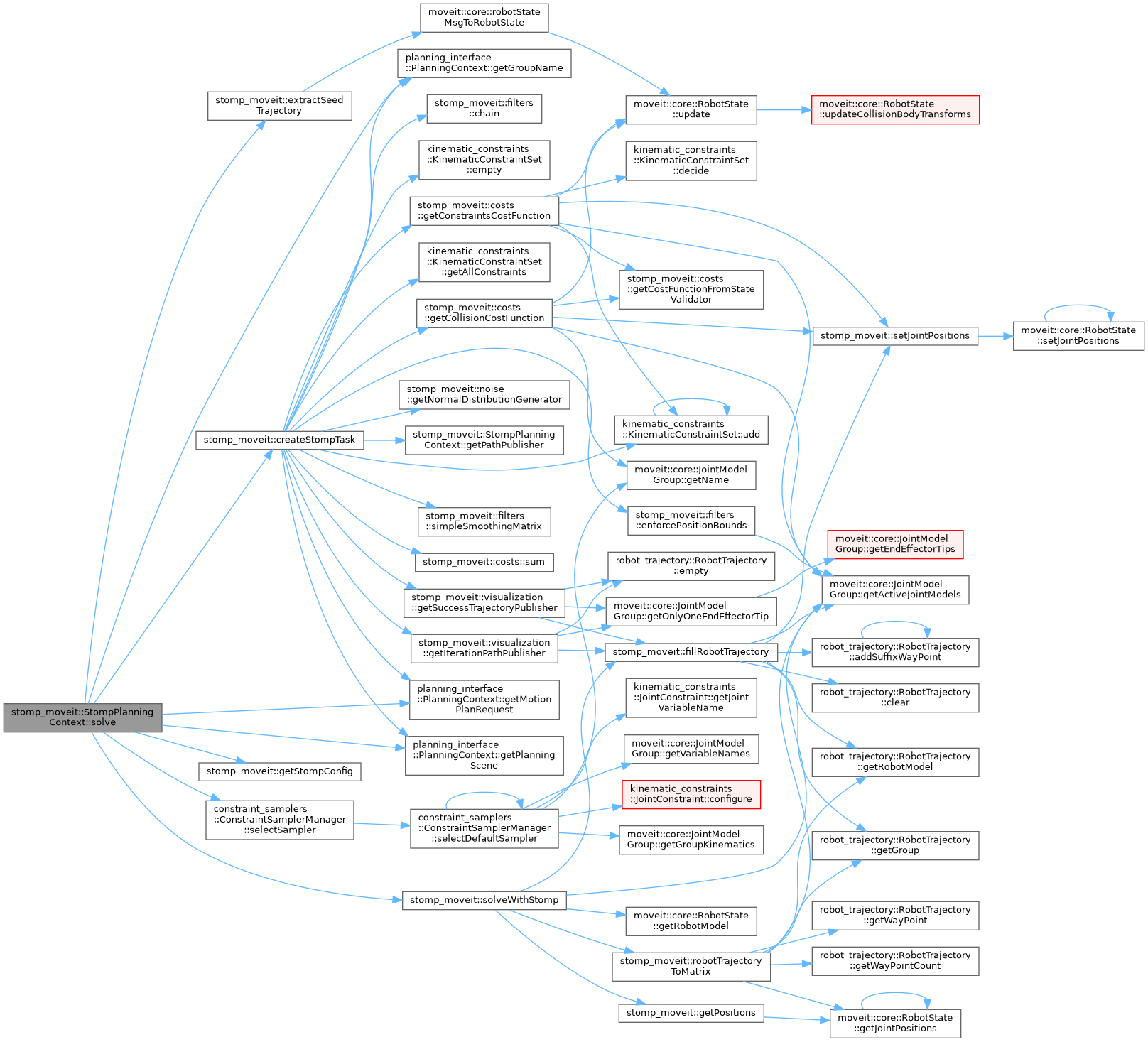
| void | solve (planning_interface::MotionPlanResponse &res) override |
| Solve the motion planning problem and store the result in res. This function should not clear data structures before computing. The constructor and clear() do that. | |
| void | solve (planning_interface::MotionPlanDetailedResponse &res) override |
| Solve the motion planning problem and store the detailed result in res. This function should not clear data structures before computing. The constructor and clear() do that. | |
| bool | terminate () override |
| If solve() is running, terminate the computation. Return false if termination not possible. No-op if solve() is not running (returns true). | |
| void | clear () override |
| Clear the data structures used by the planner. | |
| void | setPathPublisher (const std::shared_ptr< rclcpp::Publisher< visualization_msgs::msg::MarkerArray > > &path_publisher) |
| std::shared_ptr< rclcpp::Publisher< visualization_msgs::msg::MarkerArray > > | getPathPublisher () |
 Public Member Functions inherited from planning_interface::PlanningContext Public Member Functions inherited from planning_interface::PlanningContext | |
| PlanningContext (const std::string &name, const std::string &group) | |
| Construct a planning context named name for the group group. | |
| virtual | ~PlanningContext () |
| const std::string & | getGroupName () const |
| Get the name of the group this planning context is for. | |
| const std::string & | getName () const |
| Get the name of this planning context. | |
| const planning_scene::PlanningSceneConstPtr & | getPlanningScene () const |
| Get the planning scene associated to this planning context. | |
| const MotionPlanRequest & | getMotionPlanRequest () const |
| Get the motion plan request associated to this planning context. | |
| void | setPlanningScene (const planning_scene::PlanningSceneConstPtr &planning_scene) |
| Set the planning scene for this context. | |
| void | setMotionPlanRequest (const MotionPlanRequest &request) |
| Set the planning request for this context. | |
Additional Inherited Members | |
| Protected Attributes inherited from planning_interface::PlanningContext | |
| std::string | name_ |
| The name of this planning context. | |
| std::string | group_ |
| The group (as in the SRDF) this planning context is for. | |
| planning_scene::PlanningSceneConstPtr | planning_scene_ |
| The planning scene for this context. | |
| MotionPlanRequest | request_ |
| The planning request for this context. | |
Detailed Description
Definition at line 54 of file stomp_moveit_planning_context.hpp.
Constructor & Destructor Documentation
◆ StompPlanningContext()
| stomp_moveit::StompPlanningContext::StompPlanningContext | ( | const std::string & | name, |
| const std::string & | group_name, | ||
| const stomp_moveit::Params & | params | ||
| ) |
Definition at line 209 of file stomp_moveit_planning_context.cpp.
Member Function Documentation
◆ clear()
|
overridevirtual |
Clear the data structures used by the planner.
Implements planning_interface::PlanningContext.
Definition at line 300 of file stomp_moveit_planning_context.cpp.
◆ getPathPublisher()
| std::shared_ptr< rclcpp::Publisher< visualization_msgs::msg::MarkerArray > > stomp_moveit::StompPlanningContext::getPathPublisher | ( | ) |
Definition at line 310 of file stomp_moveit_planning_context.cpp.

◆ setPathPublisher()
| void stomp_moveit::StompPlanningContext::setPathPublisher | ( | const std::shared_ptr< rclcpp::Publisher< visualization_msgs::msg::MarkerArray > > & | path_publisher | ) |
Definition at line 304 of file stomp_moveit_planning_context.cpp.
◆ solve() [1/2]
|
overridevirtual |
Solve the motion planning problem and store the detailed result in res. This function should not clear data structures before computing. The constructor and clear() do that.
Implements planning_interface::PlanningContext.
Definition at line 280 of file stomp_moveit_planning_context.cpp.
◆ solve() [2/2]
|
overridevirtual |
Solve the motion planning problem and store the result in res. This function should not clear data structures before computing. The constructor and clear() do that.
Implements planning_interface::PlanningContext.
Definition at line 215 of file stomp_moveit_planning_context.cpp.
◆ terminate()
|
overridevirtual |
If solve() is running, terminate the computation. Return false if termination not possible. No-op if solve() is not running (returns true).
Implements planning_interface::PlanningContext.
Definition at line 288 of file stomp_moveit_planning_context.cpp.
The documentation for this class was generated from the following files:
- moveit_planners/stomp/include/stomp_moveit/stomp_moveit_planning_context.hpp
- moveit_planners/stomp/src/stomp_moveit_planning_context.cpp