Response to a planning query. More...
#include <planning_response.hpp>
Collaboration diagram for planning_interface::MotionPlanResponse:
Public Member Functions | |
| MotionPlanResponse () | |
| Constructor. | |
| void | getMessage (moveit_msgs::msg::MotionPlanResponse &msg) const |
| Construct a ROS message from struct data. | |
| operator bool () const | |
Public Attributes | |
| robot_trajectory::RobotTrajectoryPtr | trajectory |
| double | planning_time |
| moveit::core::MoveItErrorCode | error_code |
| moveit_msgs::msg::RobotState | start_state |
| The full starting state used for planning. | |
| std::string | planner_id |
Detailed Description
Response to a planning query.
Definition at line 48 of file planning_response.hpp.
Constructor & Destructor Documentation
◆ MotionPlanResponse()
|
inline |
Constructor.
Definition at line 51 of file planning_response.hpp.
Member Function Documentation
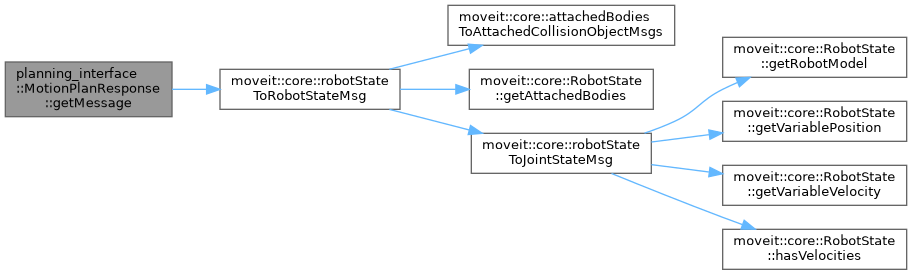
◆ getMessage()
| void planning_interface::MotionPlanResponse::getMessage | ( | moveit_msgs::msg::MotionPlanResponse & | msg | ) | const |
Construct a ROS message from struct data.
Definition at line 40 of file planning_response.cpp.
Here is the call graph for this function:
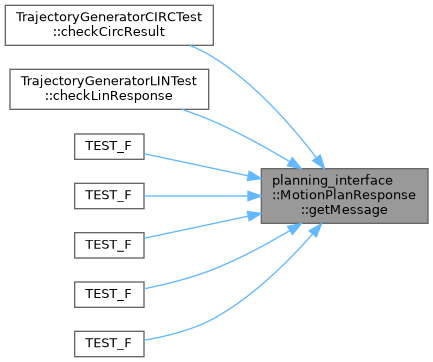
Here is the caller graph for this function:
◆ operator bool()
|
inlineexplicit |
Definition at line 69 of file planning_response.hpp.
Member Data Documentation
◆ error_code
| moveit::core::MoveItErrorCode planning_interface::MotionPlanResponse::error_code |
Definition at line 63 of file planning_response.hpp.
◆ planner_id
| std::string planning_interface::MotionPlanResponse::planner_id |
Definition at line 66 of file planning_response.hpp.
◆ planning_time
| double planning_interface::MotionPlanResponse::planning_time |
Definition at line 61 of file planning_response.hpp.
◆ start_state
| moveit_msgs::msg::RobotState planning_interface::MotionPlanResponse::start_state |
The full starting state used for planning.
Definition at line 65 of file planning_response.hpp.
◆ trajectory
| robot_trajectory::RobotTrajectoryPtr planning_interface::MotionPlanResponse::trajectory |
Definition at line 59 of file planning_response.hpp.
The documentation for this struct was generated from the following files:
- moveit_core/planning_interface/include/moveit/planning_interface/planning_response.hpp
- moveit_core/planning_interface/src/planning_response.cpp