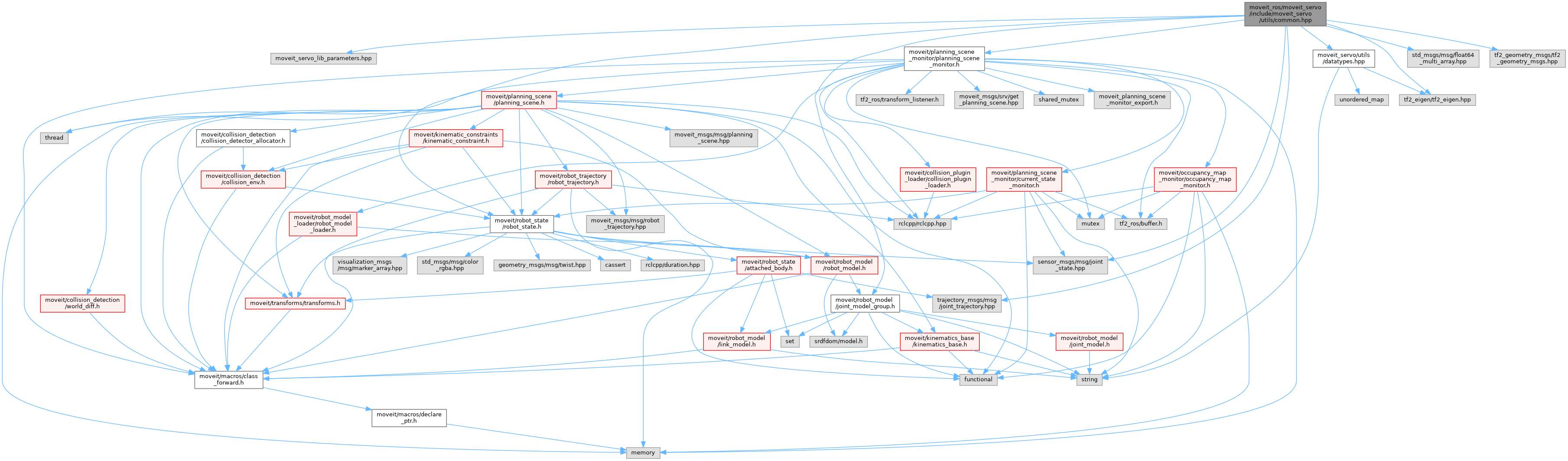
#include <moveit_servo/moveit_servo_lib_parameters.hpp>#include <moveit_servo/utils/datatypes.hpp>#include <moveit/planning_scene_monitor/planning_scene_monitor.hpp>#include <moveit/robot_model/joint_model_group.hpp>#include <moveit/robot_state/robot_state.hpp>#include <sensor_msgs/msg/joint_state.hpp>#include <std_msgs/msg/float64_multi_array.hpp>#include <tf2_eigen/tf2_eigen.hpp>#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>#include <trajectory_msgs/msg/joint_trajectory.hpp>
Include dependency graph for common.hpp:
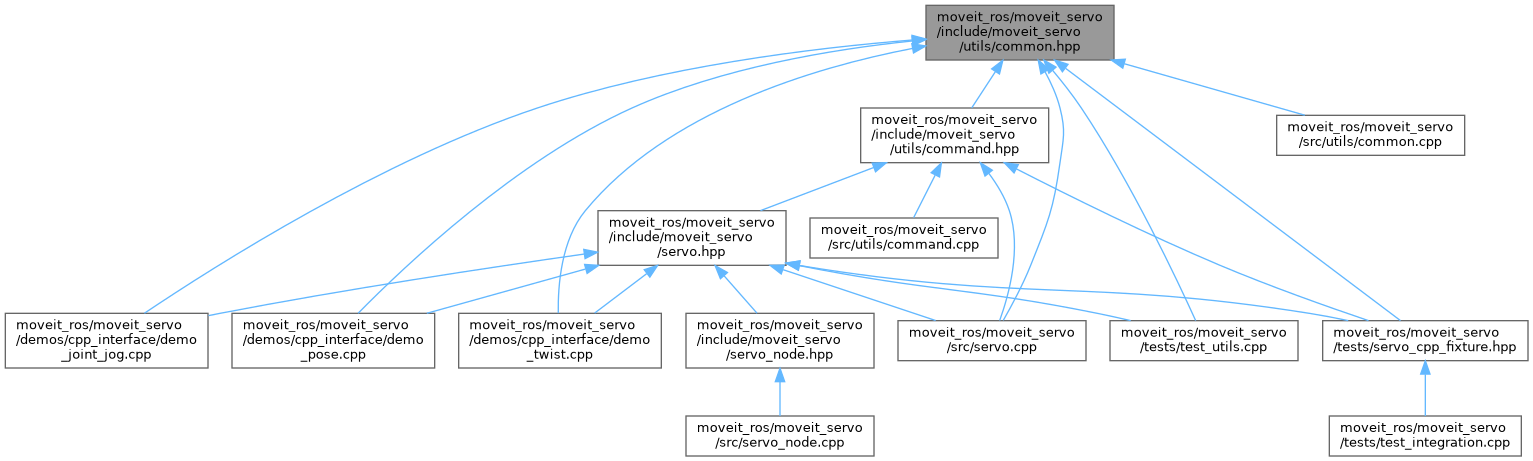
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | moveit_servo |
Functions | |
| std::optional< std::string > | moveit_servo::getIKSolverBaseFrame (const moveit::core::RobotStatePtr &robot_state, const std::string &group_name) |
| Get the base frame of the current active joint group or subgroup's IK solver. | |
| std::optional< std::string > | moveit_servo::getIKSolverTipFrame (const moveit::core::RobotStatePtr &robot_state, const std::string &group_name) |
| Get the tip (end-effector) frame of the current active joint group or subgroup's IK solver. | |
| bool | moveit_servo::isValidCommand (const Eigen::VectorXd &command) |
| Checks if a given VectorXd is a valid command. | |
| bool | moveit_servo::isValidCommand (const Eigen::Isometry3d &command) |
| Checks if a given Isometry3d (pose) is a valid command. | |
| bool | moveit_servo::isValidCommand (const TwistCommand &command) |
| Checks if a given Twist command is valid. | |
| bool | moveit_servo::isValidCommand (const PoseCommand &command) |
| Checks if a given Pose command is valid. | |
| geometry_msgs::msg::Pose | moveit_servo::poseFromCartesianDelta (const Eigen::VectorXd &delta_x, const Eigen::Isometry3d &base_to_tip_frame_transform) |
| Create a pose message for the provided change in Cartesian position. | |
| std::optional< trajectory_msgs::msg::JointTrajectory > | moveit_servo::composeTrajectoryMessage (const servo::Params &servo_params, const std::deque< KinematicState > &joint_cmd_rolling_window) |
| Create a trajectory message from a rolling window queue of joint state commands. Method optionally returns a trajectory message if one can be created. | |
| void | moveit_servo::updateSlidingWindow (KinematicState &next_joint_state, std::deque< KinematicState > &joint_cmd_rolling_window, double max_expected_latency, const rclcpp::Time &cur_time) |
| Adds a new joint state command to a queue containing commands over a time window. Also modifies the velocities of the commands to help avoid overshooting. | |
| std_msgs::msg::Float64MultiArray | moveit_servo::composeMultiArrayMessage (const servo::Params &servo_params, const KinematicState &joint_state) |
| Create a Float64MultiArray message from given joint state. | |
| std::pair< double, StatusCode > | moveit_servo::velocityScalingFactorForSingularity (const moveit::core::RobotStatePtr &robot_state, const Eigen::VectorXd &target_delta_x, const servo::Params &servo_params) |
| Computes scaling factor for velocity when the robot is near a singularity. | |
| double | moveit_servo::jointLimitVelocityScalingFactor (const Eigen::VectorXd &velocities, const moveit::core::JointBoundsVector &joint_bounds, double scaling_override) |
| Apply velocity scaling based on joint limits. If the robot model does not have velocity limits defined, then a scale factor of 1.0 will be returned. | |
| std::vector< size_t > | moveit_servo::jointVariablesToHalt (const Eigen::VectorXd &positions, const Eigen::VectorXd &velocities, const moveit::core::JointBoundsVector &joint_bounds, const std::vector< double > &margins) |
| Finds the joint variable indices corresponding to joints exceeding allowable position limits. | |
| geometry_msgs::msg::TransformStamped | moveit_servo::convertIsometryToTransform (const Eigen::Isometry3d &eigen_tf, const std::string &parent_frame, const std::string &child_frame) |
| Helper function for converting Eigen::Isometry3d to geometry_msgs/TransformStamped. | |
| PoseCommand | moveit_servo::poseFromPoseStamped (const geometry_msgs::msg::PoseStamped &msg) |
| Convert a PoseStamped message to a Servo Pose. | |
| planning_scene_monitor::PlanningSceneMonitorPtr | moveit_servo::createPlanningSceneMonitor (const rclcpp::Node::SharedPtr &node, const servo::Params &servo_params) |
| Creates the planning scene monitor used by servo. | |
| KinematicState | moveit_servo::extractRobotState (const moveit::core::RobotStatePtr &robot_state, const std::string &move_group_name) |
| Extract the state from a RobotStatePtr instance. | |
Variables | |
| constexpr int | moveit_servo::MIN_POINTS_FOR_TRAJ_MSG = 3 |