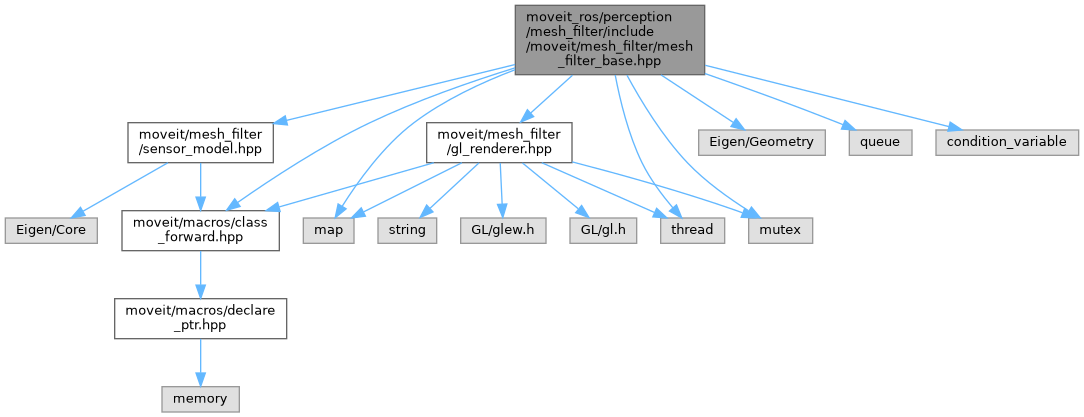
#include <map>#include <moveit/macros/class_forward.hpp>#include <moveit/mesh_filter/gl_renderer.hpp>#include <moveit/mesh_filter/sensor_model.hpp>#include <Eigen/Geometry>#include <queue>#include <thread>#include <condition_variable>#include <mutex>
Include dependency graph for mesh_filter_base.hpp:
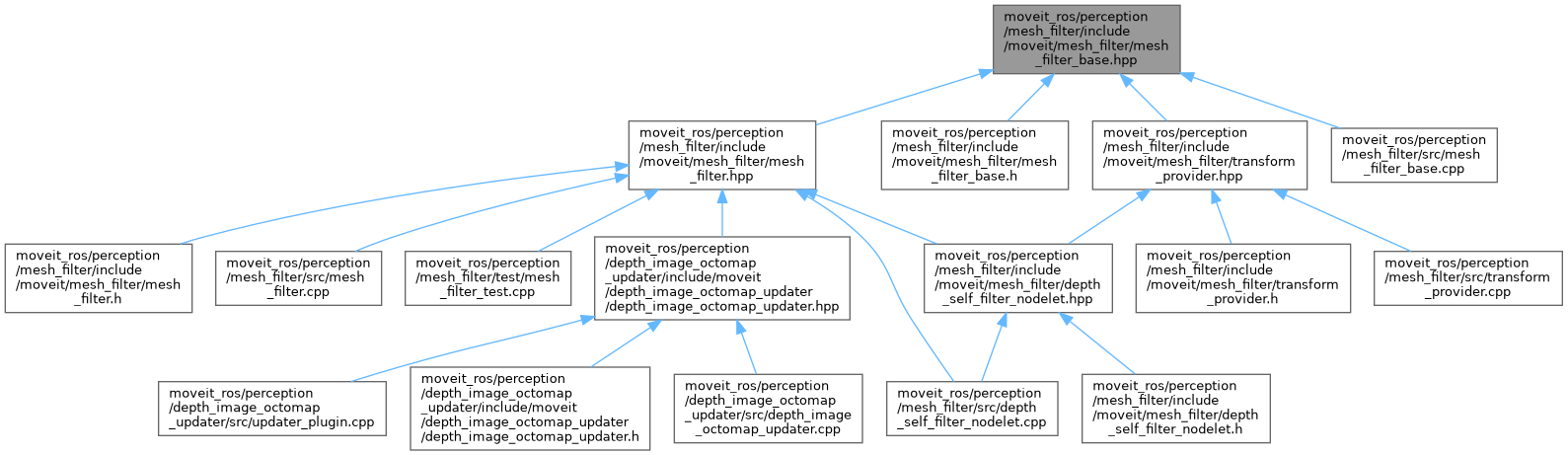
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mesh_filter::MeshFilterBase |
Namespaces | |
| namespace | shapes |
| namespace | mesh_filter |
Typedefs | |
| typedef unsigned int | mesh_filter::MeshHandle |
| typedef uint32_t | mesh_filter::LabelType |
Functions | |
| mesh_filter::MOVEIT_CLASS_FORWARD (Job) | |
| mesh_filter::MOVEIT_CLASS_FORWARD (GLMesh) | |