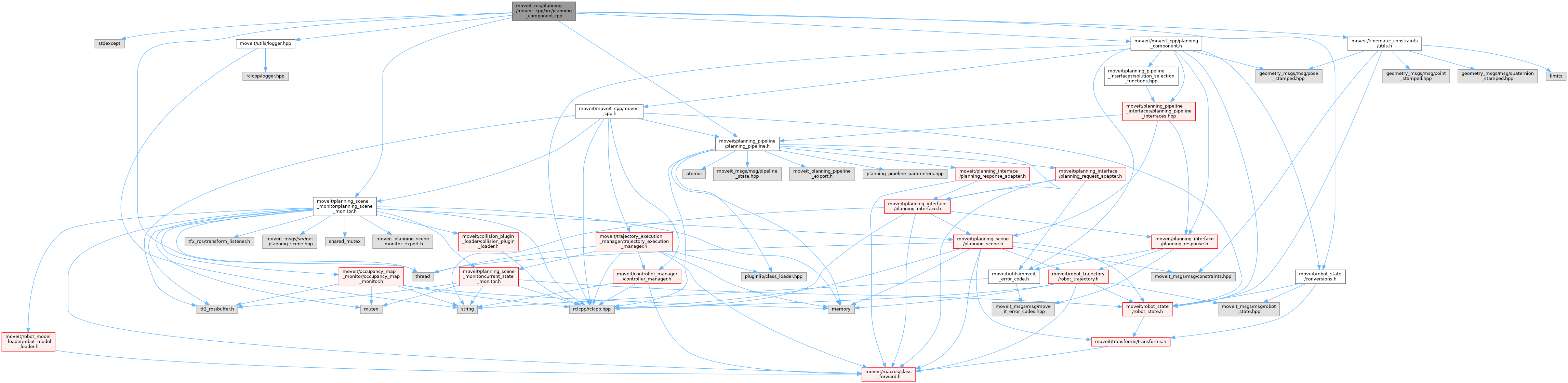
#include <stdexcept>#include <moveit/moveit_cpp/planning_component.hpp>#include <moveit/kinematic_constraints/utils.hpp>#include <moveit/planning_pipeline/planning_pipeline.hpp>#include <moveit/planning_scene_monitor/planning_scene_monitor.hpp>#include <moveit/robot_state/conversions.hpp>#include <thread>#include <moveit/utils/logger.hpp>
Include dependency graph for planning_component.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit_cpp |