State space to be used in combination with OMPL's constrained planning functionality. More...
#include <constrained_planning_state_space.h>
Public Member Functions | |
| ConstrainedPlanningStateSpace (const ModelBasedStateSpaceSpecification &spec) | |
| const std::string & | getParameterizationType () const override |
| double * | getValueAddressAtIndex (ompl::base::State *ompl_state, const unsigned int index) const override |
| void | copyToRobotState (moveit::core::RobotState &robot_state, const ompl::base::State *ompl_state) const override |
| Copy the data from an OMPL state to a set of joint states. More... | |
| void | copyToOMPLState (ompl::base::State *ompl_state, const moveit::core::RobotState &robot_state) const override |
| Copy the data from a set of joint states to an OMPL state. More... | |
| void | copyJointToOMPLState (ompl::base::State *ompl_state, const moveit::core::RobotState &robot_state, const moveit::core::JointModel *joint_model, int ompl_state_joint_index) const override |
| Copy a single joint's values (which might have multiple variables) from a MoveIt robot_state to an OMPL state. More... | |
 Public Member Functions inherited from ompl_interface::ModelBasedStateSpace Public Member Functions inherited from ompl_interface::ModelBasedStateSpace | |
| ModelBasedStateSpace (ModelBasedStateSpaceSpecification spec) | |
| ~ModelBasedStateSpace () override | |
| void | setInterpolationFunction (const InterpolationFunction &fun) |
| void | setDistanceFunction (const DistanceFunction &fun) |
| ompl::base::State * | allocState () const override |
| void | freeState (ompl::base::State *state) const override |
| unsigned int | getDimension () const override |
| void | enforceBounds (ompl::base::State *state) const override |
| bool | satisfiesBounds (const ompl::base::State *state) const override |
| void | copyState (ompl::base::State *destination, const ompl::base::State *source) const override |
| void | interpolate (const ompl::base::State *from, const ompl::base::State *to, const double t, ompl::base::State *state) const override |
| double | distance (const ompl::base::State *state1, const ompl::base::State *state2) const override |
| bool | equalStates (const ompl::base::State *state1, const ompl::base::State *state2) const override |
| double | getMaximumExtent () const override |
| double | getMeasure () const override |
| unsigned int | getSerializationLength () const override |
| void | serialize (void *serialization, const ompl::base::State *state) const override |
| void | deserialize (ompl::base::State *state, const void *serialization) const override |
| double * | getValueAddressAtIndex (ompl::base::State *state, const unsigned int index) const override |
| ompl::base::StateSamplerPtr | allocDefaultStateSampler () const override |
| const moveit::core::RobotModelConstPtr & | getRobotModel () const |
| const moveit::core::JointModelGroup * | getJointModelGroup () const |
| const std::string & | getJointModelGroupName () const |
| const ModelBasedStateSpaceSpecification & | getSpecification () const |
| void | printState (const ompl::base::State *state, std::ostream &out) const override |
| void | printSettings (std::ostream &out) const override |
| virtual void | setPlanningVolume (double minX, double maxX, double minY, double maxY, double minZ, double maxZ) |
| Set the planning volume for the possible SE2 and/or SE3 components of the state space. More... | |
| const moveit::core::JointBoundsVector & | getJointsBounds () const |
| double | getTagSnapToSegment () const |
| void | setTagSnapToSegment (double snap) |
Static Public Attributes | |
| static const std::string | PARAMETERIZATION_TYPE = "ConstrainedPlanningJointModel" |
Additional Inherited Members | |
| Protected Attributes inherited from ompl_interface::ModelBasedStateSpace | |
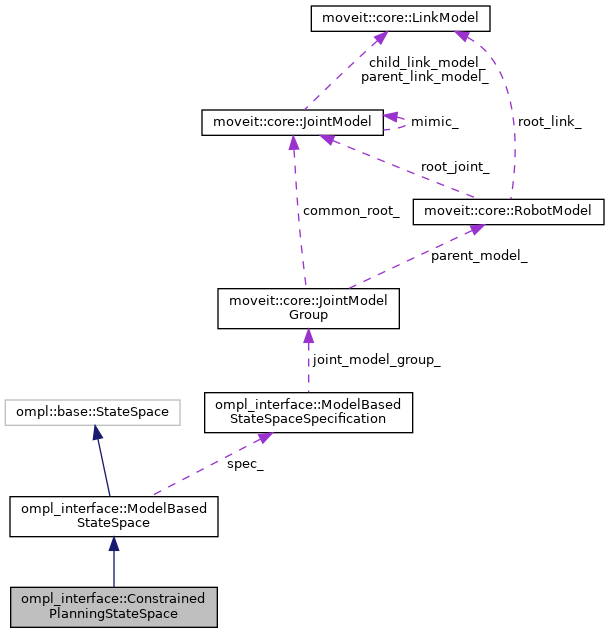
| ModelBasedStateSpaceSpecification | spec_ |
| std::vector< moveit::core::JointModel::Bounds > | joint_bounds_storage_ |
| std::vector< const moveit::core::JointModel * > | joint_model_vector_ |
| unsigned int | variable_count_ |
| size_t | state_values_size_ |
| InterpolationFunction | interpolation_function_ |
| DistanceFunction | distance_function_ |
| double | tag_snap_to_segment_ |
| double | tag_snap_to_segment_complement_ |
Detailed Description
State space to be used in combination with OMPL's constrained planning functionality.
The state space is called ConstrainedPlanningStateSpace, as in "use this state space for constrained planning". Not to be confused with the ompl::base::ConstrainedStateSpace, which is constrained in the sense that it generates states that satisfy the constraints. This state space does not! OMPL's ompl::base::ConstrainedStateSpace will wrap around ConstrainedPlanningStateSpace.
This class overrides the virtual methods to copy states from OMPL to MoveIt and vice-versa. It is used as state space in the ModelBasedPlanningContextSpecification and can handle general ompl::base::State* pointers that need to be casted to a ompl::Base::ConstrainedStateSpace::StateType, instead of the 'normal' ompl_interface::ModelBasedStateSpace::StateType. This casting looks like this:
ompl_state->as<ompl::base::ConstrainedStateSpace::StateType>()->getState()->as<StateType>()
where getState() is used to access the underlying state space, which should be an instance of this class.
Definition at line 62 of file constrained_planning_state_space.h.
Constructor & Destructor Documentation
◆ ConstrainedPlanningStateSpace()
| ompl_interface::ConstrainedPlanningStateSpace::ConstrainedPlanningStateSpace | ( | const ModelBasedStateSpaceSpecification & | spec | ) |
Definition at line 45 of file constrained_planning_state_space.cpp.
Member Function Documentation
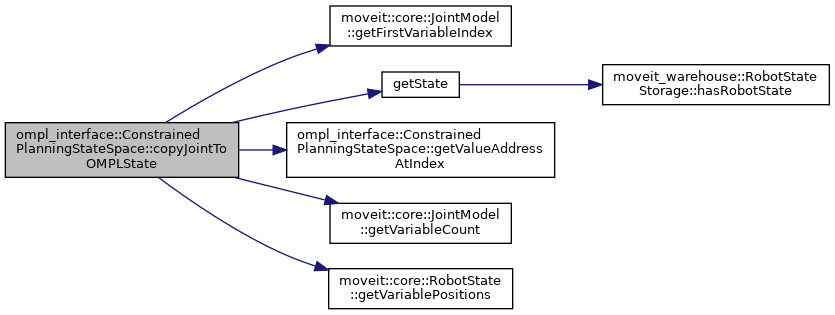
◆ copyJointToOMPLState()
|
overridevirtual |
Copy a single joint's values (which might have multiple variables) from a MoveIt robot_state to an OMPL state.
- Parameters
-
state - output OMPL state with single joint modified robot_state - input MoveIt state to get the joint value from joint_model - the joint to copy values of ompl_state_joint_index - the index of the joint in the ompl state (passed in for efficiency, you should cache this index) e.g. ompl_state_joint_index = joint_model_group_->getVariableGroupIndex("virtual_joint");
Reimplemented from ompl_interface::ModelBasedStateSpace.
Definition at line 86 of file constrained_planning_state_space.cpp.
◆ copyToOMPLState()
|
overridevirtual |
Copy the data from a set of joint states to an OMPL state.
Reimplemented from ompl_interface::ModelBasedStateSpace.
Definition at line 74 of file constrained_planning_state_space.cpp.

◆ copyToRobotState()
|
overridevirtual |
Copy the data from an OMPL state to a set of joint states.
Reimplemented from ompl_interface::ModelBasedStateSpace.
Definition at line 64 of file constrained_planning_state_space.cpp.

◆ getParameterizationType()
|
inlineoverridevirtual |
Implements ompl_interface::ModelBasedStateSpace.
Definition at line 69 of file constrained_planning_state_space.h.
◆ getValueAddressAtIndex()
|
override |
Definition at line 51 of file constrained_planning_state_space.cpp.

Member Data Documentation
◆ PARAMETERIZATION_TYPE
|
static |
Definition at line 65 of file constrained_planning_state_space.h.
The documentation for this class was generated from the following files:
- moveit_planners/ompl/ompl_interface/include/moveit/ompl_interface/parameterization/joint_space/constrained_planning_state_space.h
- moveit_planners/ompl/ompl_interface/src/parameterization/joint_space/constrained_planning_state_space.cpp