#include <gtest/gtest.h>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_model_loader/robot_model_loader.h>#include <pilz_industrial_motion_planner/joint_limits_aggregator.h>#include <pilz_industrial_motion_planner/joint_limits_extension.h>#include <pilz_industrial_motion_planner/joint_limits_interface_extension.h>#include <rclcpp/rclcpp.hpp>
Go to the source code of this file.
Classes | |
| class | JointLimitsAggregator |
| Unittest of the JointLimitsAggregator class. More... | |
Functions | |
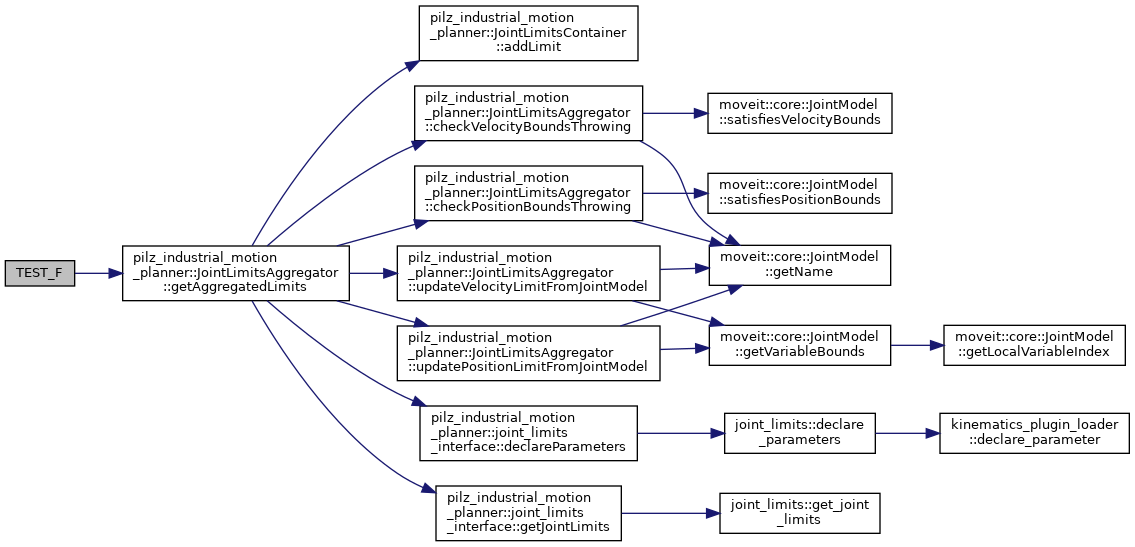
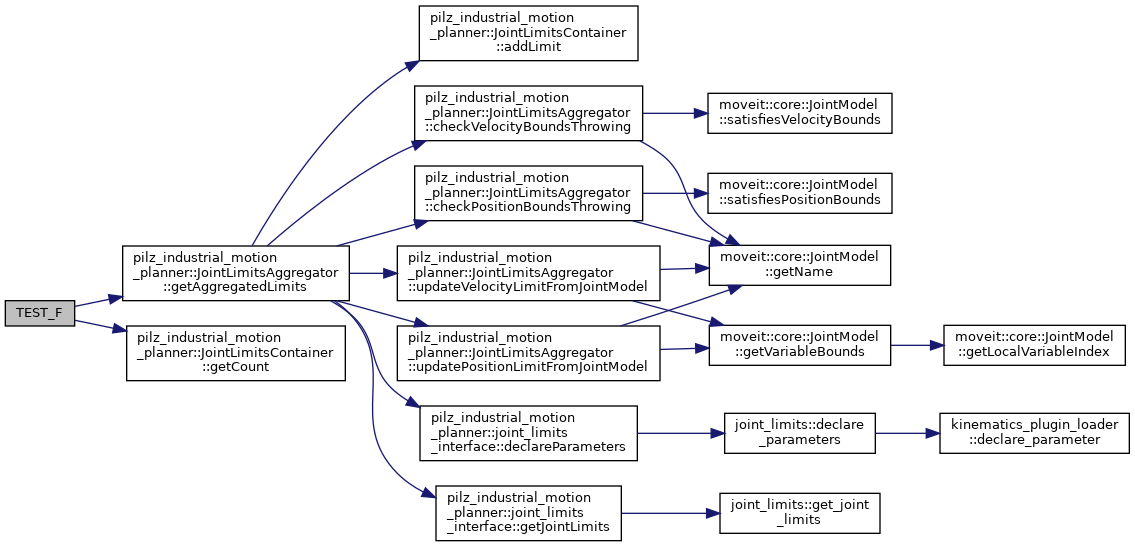
| TEST_F (JointLimitsAggregator, ExpectedMapSize) | |
| Check for that the size of the map and the size of the given joint models is equal. More... | |
| TEST_F (JointLimitsAggregator, CorrectOverwriteByParamterPosition) | |
| Check that the value in the node parameters correctly overrides the position(if within limits) More... | |
| TEST_F (JointLimitsAggregator, CorrectOverwriteByParamterVelocity) | |
| Check that the value in the node parameter correctly overrides the velocity(if within limits) More... | |
| TEST_F (JointLimitsAggregator, CorrectSettingAccelerationAndDeceleration) | |
| Check that the acceleration and deceleration are set properly. More... | |
| TEST_F (JointLimitsAggregator, LimitsViolationPosition) | |
| Check that position limit violations are detected properly. More... | |
| TEST_F (JointLimitsAggregator, LimitsViolationVelocity) | |
| Check that velocity limit violations are detected properly. More... | |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 195 of file unittest_joint_limits_aggregator.cpp.
◆ TEST_F() [1/6]
| TEST_F | ( | JointLimitsAggregator | , |
| CorrectOverwriteByParamterPosition | |||
| ) |
Check that the value in the node parameters correctly overrides the position(if within limits)
Definition at line 92 of file unittest_joint_limits_aggregator.cpp.
◆ TEST_F() [2/6]
| TEST_F | ( | JointLimitsAggregator | , |
| CorrectOverwriteByParamterVelocity | |||
| ) |
Check that the value in the node parameter correctly overrides the velocity(if within limits)
Definition at line 121 of file unittest_joint_limits_aggregator.cpp.
◆ TEST_F() [3/6]
| TEST_F | ( | JointLimitsAggregator | , |
| CorrectSettingAccelerationAndDeceleration | |||
| ) |
Check that the acceleration and deceleration are set properly.
Definition at line 145 of file unittest_joint_limits_aggregator.cpp.
◆ TEST_F() [4/6]
| TEST_F | ( | JointLimitsAggregator | , |
| ExpectedMapSize | |||
| ) |
Check for that the size of the map and the size of the given joint models is equal.
Definition at line 79 of file unittest_joint_limits_aggregator.cpp.
◆ TEST_F() [5/6]
| TEST_F | ( | JointLimitsAggregator | , |
| LimitsViolationPosition | |||
| ) |
Check that position limit violations are detected properly.
Definition at line 174 of file unittest_joint_limits_aggregator.cpp.
◆ TEST_F() [6/6]
| TEST_F | ( | JointLimitsAggregator | , |
| LimitsViolationVelocity | |||
| ) |
Check that velocity limit violations are detected properly.
Definition at line 188 of file unittest_joint_limits_aggregator.cpp.