#include <gtest/gtest.h>#include <pilz_industrial_motion_planner/joint_limits_container.h>#include <pilz_industrial_motion_planner/joint_limits_extension.h>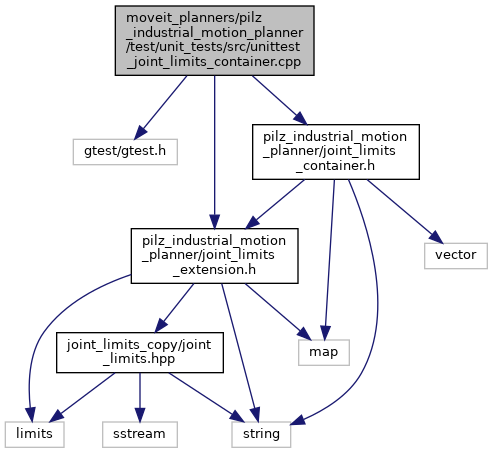
Go to the source code of this file.
Classes | |
| class | JointLimitsContainerTest |
Functions | |
| TEST_F (JointLimitsContainerTest, CheckPositionUnification) | |
| Check position. More... | |
| TEST_F (JointLimitsContainerTest, CheckVelocityUnification) | |
| Check velocity. More... | |
| TEST_F (JointLimitsContainerTest, CheckAccelerationUnification) | |
| Check acceleration. More... | |
| TEST_F (JointLimitsContainerTest, CheckDecelerationUnification) | |
| Check deceleration. More... | |
| TEST_F (JointLimitsContainerTest, CheckAddLimitDeceleration) | |
| Check AddLimit for positive and null deceleration. More... | |
| TEST_F (JointLimitsContainerTest, CheckAddLimitAlreadyContained) | |
| Check AddLimit for already contained limit. More... | |
| TEST_F (JointLimitsContainerTest, CheckEmptyContainer) | |
| An uninitialized container should not have any limits set. More... | |
| TEST_F (JointLimitsContainerTest, FirstPositionEmpty) | |
| empty position limits for first joint, second one should be returned More... | |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 206 of file unittest_joint_limits_container.cpp.
◆ TEST_F() [1/8]
| TEST_F | ( | JointLimitsContainerTest | , |
| CheckAccelerationUnification | |||
| ) |
Check acceleration.
Definition at line 121 of file unittest_joint_limits_container.cpp.
◆ TEST_F() [2/8]
| TEST_F | ( | JointLimitsContainerTest | , |
| CheckAddLimitAlreadyContained | |||
| ) |
Check AddLimit for already contained limit.
Definition at line 161 of file unittest_joint_limits_container.cpp.

◆ TEST_F() [3/8]
| TEST_F | ( | JointLimitsContainerTest | , |
| CheckAddLimitDeceleration | |||
| ) |
Check AddLimit for positive and null deceleration.
Definition at line 137 of file unittest_joint_limits_container.cpp.

◆ TEST_F() [4/8]
| TEST_F | ( | JointLimitsContainerTest | , |
| CheckDecelerationUnification | |||
| ) |
Check deceleration.
Definition at line 129 of file unittest_joint_limits_container.cpp.
◆ TEST_F() [5/8]
| TEST_F | ( | JointLimitsContainerTest | , |
| CheckEmptyContainer | |||
| ) |
An uninitialized container should not have any limits set.
Definition at line 175 of file unittest_joint_limits_container.cpp.

◆ TEST_F() [6/8]
| TEST_F | ( | JointLimitsContainerTest | , |
| CheckPositionUnification | |||
| ) |
Check position.
Definition at line 104 of file unittest_joint_limits_container.cpp.
◆ TEST_F() [7/8]
| TEST_F | ( | JointLimitsContainerTest | , |
| CheckVelocityUnification | |||
| ) |
Check velocity.
Definition at line 113 of file unittest_joint_limits_container.cpp.
◆ TEST_F() [8/8]
| TEST_F | ( | JointLimitsContainerTest | , |
| FirstPositionEmpty | |||
| ) |
empty position limits for first joint, second one should be returned
Definition at line 187 of file unittest_joint_limits_container.cpp.