Parameterized unittest of trajectory generator LIN to enable tests against different robot models.The parameter is the name of robot model parameter on the ros parameter server. More...
Protected Member Functions | |
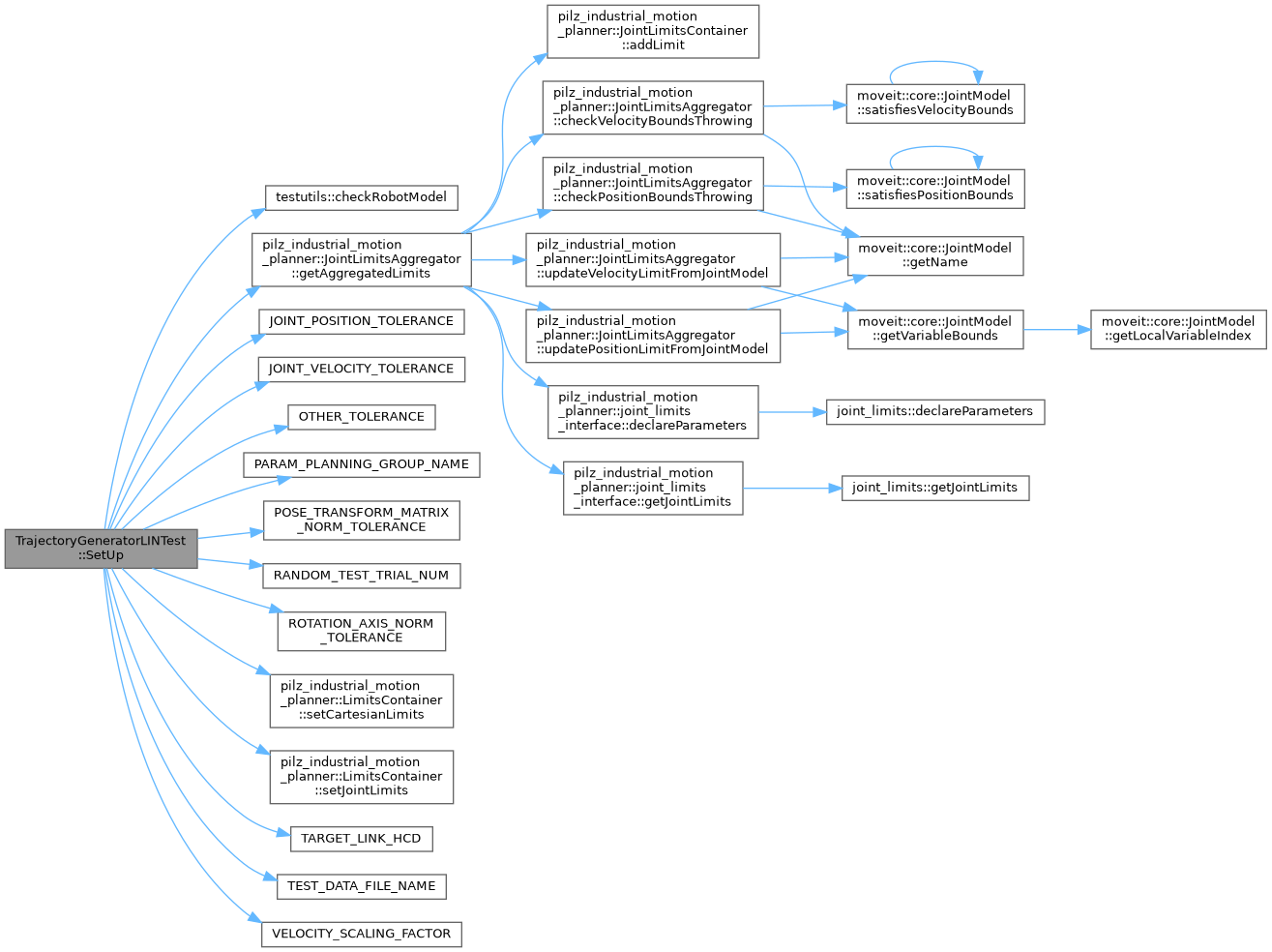
| void | SetUp () override |
| Create test scenario for lin trajectory generator. | |
| void | TearDown () override |
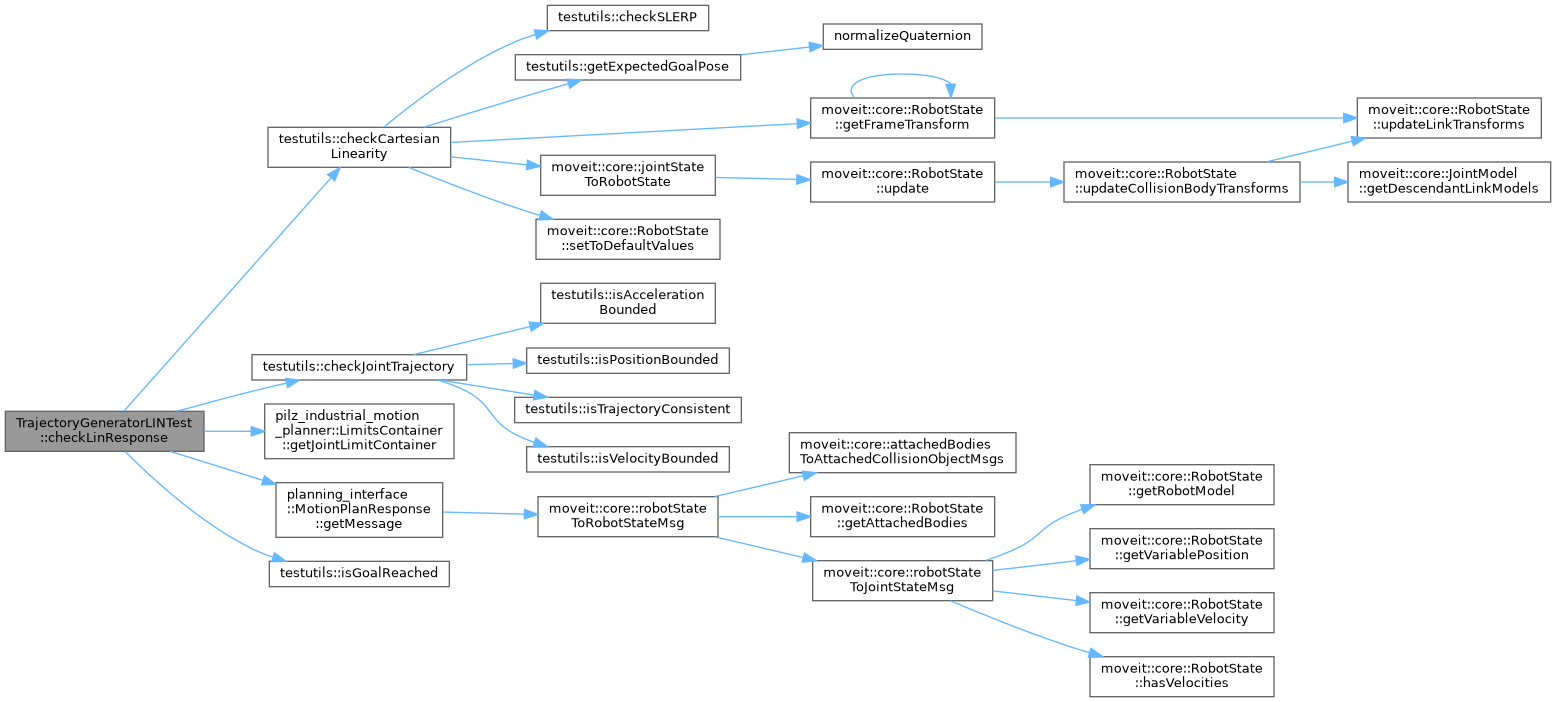
| bool | checkLinResponse (const planning_interface::MotionPlanRequest &req, const planning_interface::MotionPlanResponse &res) |
Protected Attributes | |
| rclcpp::Node::SharedPtr | node_ |
| moveit::core::RobotModelConstPtr | robot_model_ |
| std::unique_ptr< robot_model_loader::RobotModelLoader > | rm_loader_ |
| planning_scene::PlanningSceneConstPtr | planning_scene_ |
| std::unique_ptr< TrajectoryGenerator > | lin_ |
| std::unique_ptr< pilz_industrial_motion_planner_testutils::TestdataLoader > | tdp_ |
| std::string | planning_group_ |
| std::string | target_link_hcd_ |
| std::string | test_data_file_name_ |
| int | random_trial_num_ |
| double | joint_position_tolerance_ |
| double | joint_velocity_tolerance_ |
| double | pose_norm_tolerance_ |
| double | rot_axis_norm_tolerance_ |
| double | velocity_scaling_factor_ |
| double | other_tolerance_ |
| LimitsContainer | planner_limits_ |
Detailed Description
Parameterized unittest of trajectory generator LIN to enable tests against different robot models.The parameter is the name of robot model parameter on the ros parameter server.
Definition at line 77 of file unittest_trajectory_generator_lin.cpp.
Member Function Documentation
◆ checkLinResponse()
|
inlineprotected |
Definition at line 141 of file unittest_trajectory_generator_lin.cpp.
◆ SetUp()
|
inlineoverrideprotected |
Create test scenario for lin trajectory generator.
Definition at line 84 of file unittest_trajectory_generator_lin.cpp.
◆ TearDown()
|
inlineoverrideprotected |
Definition at line 136 of file unittest_trajectory_generator_lin.cpp.
Member Data Documentation
◆ joint_position_tolerance_
|
protected |
Definition at line 180 of file unittest_trajectory_generator_lin.cpp.
◆ joint_velocity_tolerance_
|
protected |
Definition at line 180 of file unittest_trajectory_generator_lin.cpp.
◆ lin_
|
protected |
Definition at line 173 of file unittest_trajectory_generator_lin.cpp.
◆ node_
|
protected |
Definition at line 167 of file unittest_trajectory_generator_lin.cpp.
◆ other_tolerance_
|
protected |
Definition at line 181 of file unittest_trajectory_generator_lin.cpp.
◆ planner_limits_
|
protected |
Definition at line 182 of file unittest_trajectory_generator_lin.cpp.
◆ planning_group_
|
protected |
Definition at line 178 of file unittest_trajectory_generator_lin.cpp.
◆ planning_scene_
|
protected |
Definition at line 170 of file unittest_trajectory_generator_lin.cpp.
◆ pose_norm_tolerance_
|
protected |
Definition at line 180 of file unittest_trajectory_generator_lin.cpp.
◆ random_trial_num_
|
protected |
Definition at line 179 of file unittest_trajectory_generator_lin.cpp.
◆ rm_loader_
|
protected |
Definition at line 169 of file unittest_trajectory_generator_lin.cpp.
◆ robot_model_
|
protected |
Definition at line 168 of file unittest_trajectory_generator_lin.cpp.
◆ rot_axis_norm_tolerance_
|
protected |
Definition at line 180 of file unittest_trajectory_generator_lin.cpp.
◆ target_link_hcd_
|
protected |
Definition at line 178 of file unittest_trajectory_generator_lin.cpp.
◆ tdp_
|
protected |
Definition at line 175 of file unittest_trajectory_generator_lin.cpp.
◆ test_data_file_name_
|
protected |
Definition at line 178 of file unittest_trajectory_generator_lin.cpp.
◆ velocity_scaling_factor_
|
protected |
Definition at line 181 of file unittest_trajectory_generator_lin.cpp.
The documentation for this class was generated from the following file:
- moveit_planners/pilz_industrial_motion_planner/test/unit_tests/src/unittest_trajectory_generator_lin.cpp