Adapter to publish the EE path as marker array via ROS topic if a path exist. Otherwise, a warning is printed but this adapter cannot fail. More...
Public Member Functions | |
| DisplayMotionPath () | |
| ~DisplayMotionPath () override=default | |
| void | initialize (const rclcpp::Node::SharedPtr &node, const std::string ¶meter_namespace) override |
| Initialize parameters using the passed Node and parameter namespace. | |
| std::string | getDescription () const override |
| Get a description of this adapter. | |
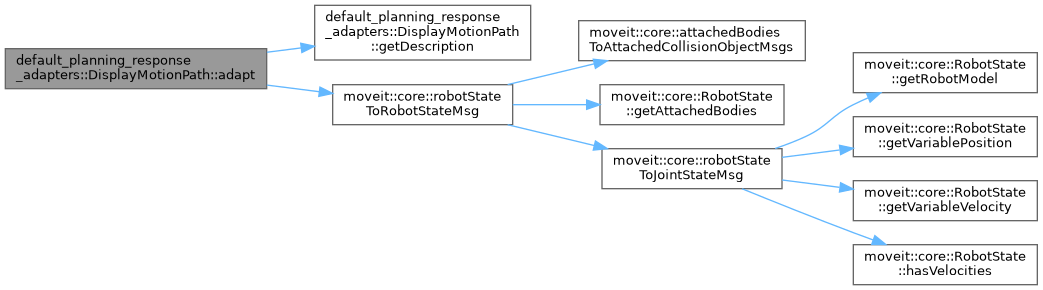
| void | adapt (const planning_scene::PlanningSceneConstPtr &planning_scene, const planning_interface::MotionPlanRequest &, planning_interface::MotionPlanResponse &res) const override |
| Adapt the planning response. | |
 Public Member Functions inherited from planning_interface::PlanningResponseAdapter Public Member Functions inherited from planning_interface::PlanningResponseAdapter | |
| virtual | ~PlanningResponseAdapter ()=default |
Detailed Description
Adapter to publish the EE path as marker array via ROS topic if a path exist. Otherwise, a warning is printed but this adapter cannot fail.
Definition at line 54 of file display_motion_path.cpp.
Constructor & Destructor Documentation
◆ DisplayMotionPath()
|
inline |
Definition at line 57 of file display_motion_path.cpp.
◆ ~DisplayMotionPath()
|
overridedefault |
Member Function Documentation
◆ adapt()
|
inlineoverridevirtual |
Adapt the planning response.
- Parameters
-
planning_scene Representation of the environment for the planning req Motion planning request with a set of constraints res Motion planning response containing the solution that is adapted.
Implements planning_interface::PlanningResponseAdapter.
Definition at line 78 of file display_motion_path.cpp.
◆ getDescription()
|
inlineoverridevirtual |
Get a description of this adapter.
- Returns
- Returns a short string that identifies the planning response adapter
Implements planning_interface::PlanningResponseAdapter.
Definition at line 73 of file display_motion_path.cpp.

◆ initialize()
|
inlineoverridevirtual |
Initialize parameters using the passed Node and parameter namespace.
- Parameters
-
node Node instance used by the adapter parameter_namespace Parameter namespace for adapter
The default implementation is empty
Reimplemented from planning_interface::PlanningResponseAdapter.
Definition at line 63 of file display_motion_path.cpp.
The documentation for this class was generated from the following file:
- moveit_ros/planning/planning_response_adapter_plugins/src/display_motion_path.cpp