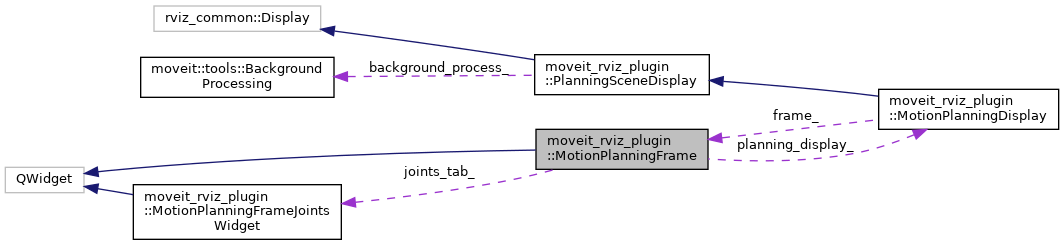
#include <motion_planning_frame.hpp>
|
| typedef std::map< std::string, moveit_msgs::msg::RobotState > | RobotStateMap |
| |
| typedef std::pair< std::string, moveit_msgs::msg::RobotState > | RobotStatePair |
| |
Definition at line 104 of file motion_planning_frame.hpp.
◆ RobotStateMap
◆ RobotStatePair
◆ MotionPlanningFrame() [1/2]
◆ MotionPlanningFrame() [2/2]
| moveit_rviz_plugin::MotionPlanningFrame::MotionPlanningFrame |
( |
MotionPlanningDisplay * |
pdisplay, |
|
|
rviz_common::DisplayContext * |
context, |
|
|
QWidget * |
parent = nullptr |
|
) |
| |
◆ ~MotionPlanningFrame()
| moveit_rviz_plugin::MotionPlanningFrame::~MotionPlanningFrame |
( |
| ) |
|
|
override |
◆ changePlanningGroup()
| void moveit_rviz_plugin::MotionPlanningFrame::changePlanningGroup |
( |
| ) |
|
◆ clearRobotModel()
| void moveit_rviz_plugin::MotionPlanningFrame::clearRobotModel |
( |
| ) |
|
◆ configChanged
| void moveit_rviz_plugin::MotionPlanningFrame::configChanged |
( |
| ) |
|
|
signal |
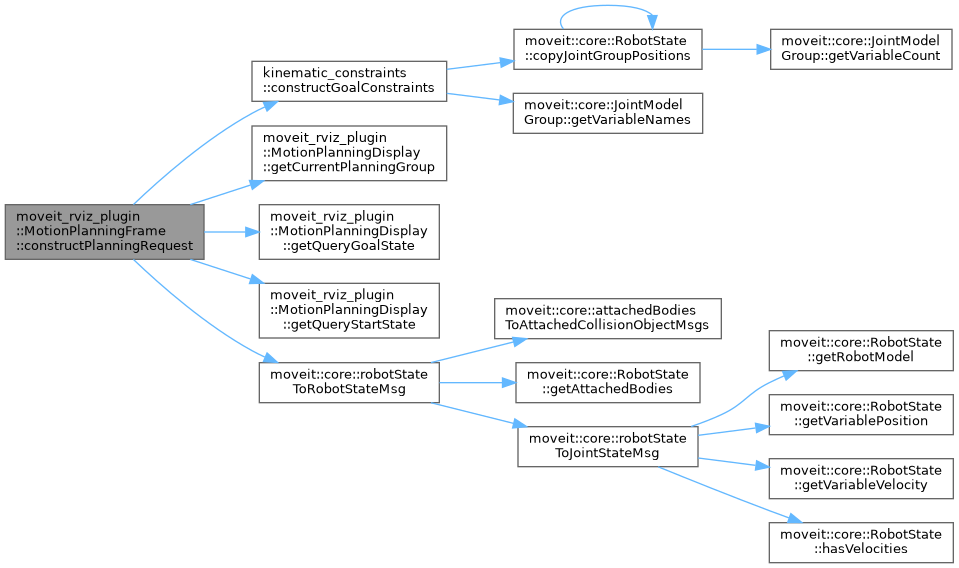
◆ constructPlanningRequest()
| void moveit_rviz_plugin::MotionPlanningFrame::constructPlanningRequest |
( |
moveit_msgs::msg::MotionPlanRequest & |
mreq | ) |
|
|
protected |
◆ disable()
| void moveit_rviz_plugin::MotionPlanningFrame::disable |
( |
| ) |
|
◆ enable()
| void moveit_rviz_plugin::MotionPlanningFrame::enable |
( |
| ) |
|
◆ initFromMoveGroupNS()
| void moveit_rviz_plugin::MotionPlanningFrame::initFromMoveGroupNS |
( |
| ) |
|
|
protected |
◆ planningFinished
| void moveit_rviz_plugin::MotionPlanningFrame::planningFinished |
( |
| ) |
|
|
signal |
◆ sceneUpdate()
◆ updateExternalCommunication()
| void moveit_rviz_plugin::MotionPlanningFrame::updateExternalCommunication |
( |
| ) |
|
|
protected |
◆ updateSceneMarkers() [1/2]
| void moveit_rviz_plugin::MotionPlanningFrame::updateSceneMarkers |
( |
double |
wall_dt, |
|
|
double |
ros_dt |
|
) |
| |
|
protected |
◆ updateSceneMarkers() [2/2]
| void moveit_rviz_plugin::MotionPlanningFrame::updateSceneMarkers |
( |
std::chrono::nanoseconds |
wall_dt, |
|
|
std::chrono::nanoseconds |
ros_dt |
|
) |
| |
|
protected |
◆ MotionPlanningDisplay
◆ constraints_storage_
| moveit_warehouse::ConstraintsStoragePtr moveit_rviz_plugin::MotionPlanningFrame::constraints_storage_ |
|
protected |
◆ context_
| rviz_common::DisplayContext* moveit_rviz_plugin::MotionPlanningFrame::context_ |
|
protected |
◆ current_plan_
| moveit::planning_interface::MoveGroupInterface::PlanPtr moveit_rviz_plugin::MotionPlanningFrame::current_plan_ |
|
protected |
◆ default_planning_pipeline_
| std::string moveit_rviz_plugin::MotionPlanningFrame::default_planning_pipeline_ |
|
protected |
◆ ITEM_TYPE_QUERY
| const int moveit_rviz_plugin::MotionPlanningFrame::ITEM_TYPE_QUERY = 2 |
|
staticprotected |
◆ ITEM_TYPE_SCENE
| const int moveit_rviz_plugin::MotionPlanningFrame::ITEM_TYPE_SCENE = 1 |
|
staticprotected |
◆ joints_tab_
◆ move_group_
| moveit::planning_interface::MoveGroupInterfacePtr moveit_rviz_plugin::MotionPlanningFrame::move_group_ |
|
protected |
◆ planner_descriptions_
| std::vector<moveit_msgs::msg::PlannerInterfaceDescription> moveit_rviz_plugin::MotionPlanningFrame::planner_descriptions_ |
|
protected |
◆ planning_display_
◆ planning_scene_storage_
| moveit_warehouse::PlanningSceneStoragePtr moveit_rviz_plugin::MotionPlanningFrame::planning_scene_storage_ |
|
protected |
◆ robot_state_storage_
| moveit_warehouse::RobotStateStoragePtr moveit_rviz_plugin::MotionPlanningFrame::robot_state_storage_ |
|
protected |
◆ robot_states_
| RobotStateMap moveit_rviz_plugin::MotionPlanningFrame::robot_states_ |
|
protected |
◆ scene_marker_
| std::shared_ptr<rviz_default_plugins::displays::InteractiveMarker> moveit_rviz_plugin::MotionPlanningFrame::scene_marker_ |
|
protected |
◆ ui_
| Ui::MotionPlanningUI* moveit_rviz_plugin::MotionPlanningFrame::ui_ |
|
protected |
The documentation for this class was generated from the following files: