PlanningSceneMonitor Subscribes to the topic planning_scene. More...
#include <planning_scene_monitor.hpp>
Public Types | |
| enum | SceneUpdateType { UPDATE_NONE = 0 , UPDATE_STATE = 1 , UPDATE_TRANSFORMS = 2 , UPDATE_GEOMETRY = 4 , UPDATE_SCENE = 8 + UPDATE_STATE + UPDATE_TRANSFORMS + UPDATE_GEOMETRY } |
Public Member Functions | |
| PlanningSceneMonitor (const PlanningSceneMonitor &)=delete | |
| PlanningSceneMonitor cannot be copy-constructed. | |
| PlanningSceneMonitor & | operator= (const PlanningSceneMonitor &)=delete |
| PlanningSceneMonitor cannot be copy-assigned. | |
| PlanningSceneMonitor (const rclcpp::Node::SharedPtr &node, const std::string &robot_description, const std::string &name="") | |
| Constructor. | |
| PlanningSceneMonitor (const rclcpp::Node::SharedPtr &node, const robot_model_loader::RobotModelLoaderPtr &rml, const std::string &name="") | |
| Constructor. | |
| PlanningSceneMonitor (const rclcpp::Node::SharedPtr &node, const planning_scene::PlanningScenePtr &scene, const std::string &robot_description, const std::string &name="") | |
| Constructor. | |
| PlanningSceneMonitor (const rclcpp::Node::SharedPtr &node, const planning_scene::PlanningScenePtr &scene, const robot_model_loader::RobotModelLoaderPtr &rml, const std::string &name="") | |
| Constructor. | |
| ~PlanningSceneMonitor () | |
| const std::string & | getName () const |
| Get the name of this monitor. | |
| const robot_model_loader::RobotModelLoaderPtr & | getRobotModelLoader () const |
| Get the user kinematic model loader. | |
| const moveit::core::RobotModelConstPtr & | getRobotModel () const |
| const planning_scene::PlanningScenePtr & | getPlanningScene () |
| Avoid this function! Returns an unsafe pointer to the current planning scene. | |
| const planning_scene::PlanningSceneConstPtr & | getPlanningScene () const |
| Avoid this function! Returns an unsafe pointer to the current planning scene. | |
| planning_scene::PlanningScenePtr | copyPlanningScene (const moveit_msgs::msg::PlanningScene &diff=moveit_msgs::msg::PlanningScene()) |
| Returns a copy of the current planning scene. | |
| bool | updatesScene (const planning_scene::PlanningSceneConstPtr &scene) const |
| Return true if the scene scene can be updated directly or indirectly by this monitor. This function will return true if the pointer of the scene is the same as the one maintained, or if a parent of the scene is the one maintained. | |
| bool | updatesScene (const planning_scene::PlanningScenePtr &scene) const |
| Return true if the scene scene can be updated directly or indirectly by this monitor. This function will return true if the pointer of the scene is the same as the one maintained, or if a parent of the scene is the one maintained. | |
| const std::string & | getRobotDescription () const |
| Get the stored robot description. | |
| double | getDefaultRobotPadding () const |
| Get the default robot padding. | |
| double | getDefaultRobotScale () const |
| Get the default robot scaling. | |
| double | getDefaultObjectPadding () const |
| Get the default object padding. | |
| double | getDefaultAttachedObjectPadding () const |
| Get the default attached padding. | |
| const std::shared_ptr< tf2_ros::Buffer > & | getTFClient () const |
| Get the instance of the TF client that was passed to the constructor of this class. | |
| void | monitorDiffs (bool flag) |
| By default, the maintained planning scene does not reason about diffs. When the flag passed in is true, the maintained scene starts counting diffs. Future updates to the planning scene will be stored as diffs and can be retrieved as such. Setting the flag to false restores the default behaviour. Maintaining diffs is automatically enabled when publishing planning scenes. | |
| void | startPublishingPlanningScene (SceneUpdateType event, const std::string &planning_scene_topic=MONITORED_PLANNING_SCENE_TOPIC) |
| Start publishing the maintained planning scene. The first message set out is a complete planning scene. Diffs are sent afterwards on updates specified by the event bitmask. For UPDATE_SCENE, the full scene is always sent. | |
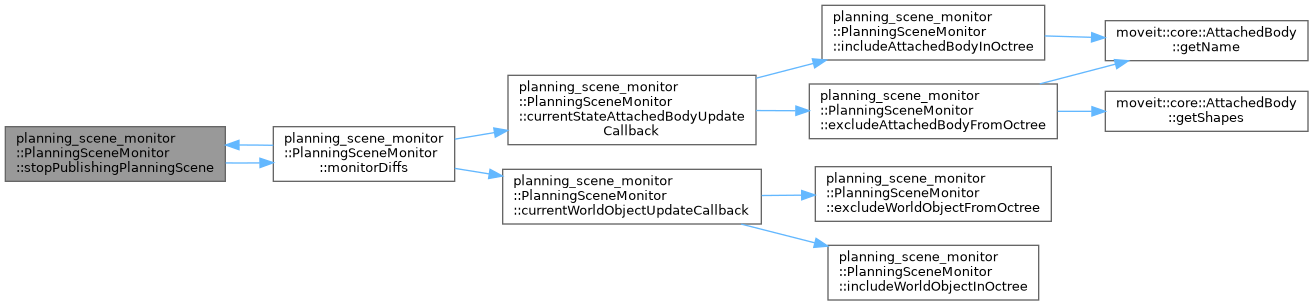
| void | stopPublishingPlanningScene () |
| Stop publishing the maintained planning scene. | |
| void | setPlanningScenePublishingFrequency (double hz) |
| Set the maximum frequency at which planning scenes are being published. | |
| double | getPlanningScenePublishingFrequency () const |
| Get the maximum frequency at which planning scenes are published (Hz) | |
| const CurrentStateMonitorPtr & | getStateMonitor () const |
| Get the stored instance of the stored current state monitor. | |
| CurrentStateMonitorPtr & | getStateMonitorNonConst () |
| void | updateFrameTransforms () |
| Update the transforms for the frames that are not part of the kinematic model using tf. Examples of these frames are the "map" and "odom_combined" transforms. This function is automatically called when data that uses transforms is received. However, this function should also be called before starting a planning request, for example. | |
| void | startStateMonitor (const std::string &joint_states_topic=DEFAULT_JOINT_STATES_TOPIC, const std::string &attached_objects_topic=DEFAULT_ATTACHED_COLLISION_OBJECT_TOPIC) |
| Start the current state monitor. | |
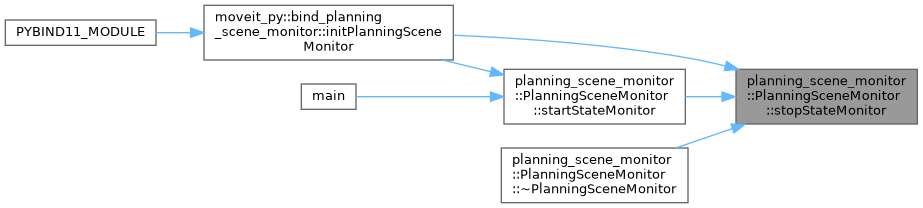
| void | stopStateMonitor () |
| Stop the state monitor. | |
| void | updateSceneWithCurrentState (bool skip_update_if_locked=false) |
| Update the scene using the monitored state. This function is automatically called when an update to the current state is received (if startStateMonitor() has been called). The updates are throttled to a maximum update frequency however, which is set by setStateUpdateFrequency(). | |
| void | setStateUpdateFrequency (double hz) |
| Update the scene using the monitored state at a specified frequency, in Hz. This function has an effect only when updates from the CurrentStateMonitor are received at a higher frequency. In that case, the updates are throttled down, so that they do not exceed a maximum update frequency specified here. | |
| double | getStateUpdateFrequency () const |
| Get the maximum frequency (Hz) at which the current state of the planning scene is updated. | |
| void | startSceneMonitor (const std::string &scene_topic=DEFAULT_PLANNING_SCENE_TOPIC) |
| Start the scene monitor (ROS topic-based) | |
| bool | requestPlanningSceneState (const std::string &service_name=DEFAULT_PLANNING_SCENE_SERVICE) |
| Request a full planning scene state using a service call Be careful not to use this in conjunction with providePlanningSceneService(), as it will create a pointless feedback loop. | |
| void | providePlanningSceneService (const std::string &service_name=DEFAULT_PLANNING_SCENE_SERVICE) |
| Create an optional service for getting the complete planning scene This is useful for satisfying the Rviz PlanningScene display's need for a service without having to use a move_group node. Be careful not to use this in conjunction with requestPlanningSceneState(), as it will create a pointless feedback loop. | |
| void | stopSceneMonitor () |
| Stop the scene monitor. | |
| void | startWorldGeometryMonitor (const std::string &collision_objects_topic=DEFAULT_COLLISION_OBJECT_TOPIC, const std::string &planning_scene_world_topic=DEFAULT_PLANNING_SCENE_WORLD_TOPIC, const bool load_octomap_monitor=true) |
| Start the OccupancyMapMonitor and listening for: | |
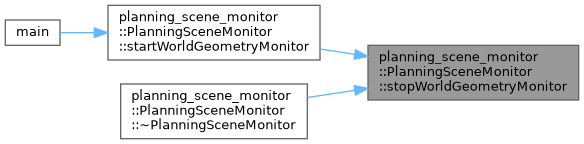
| void | stopWorldGeometryMonitor () |
| Stop the world geometry monitor. | |
| void | addUpdateCallback (const std::function< void(SceneUpdateType)> &fn) |
| Add a function to be called when an update to the scene is received. | |
| void | clearUpdateCallbacks () |
| Clear the functions to be called when an update to the scene is received. | |
| void | getMonitoredTopics (std::vector< std::string > &topics) const |
| Get the topic names that the monitor is listening to. | |
| const rclcpp::Time & | getLastUpdateTime () const |
| Return the time when the last update was made to the planning scene (by any monitor) | |
| void | publishDebugInformation (bool flag) |
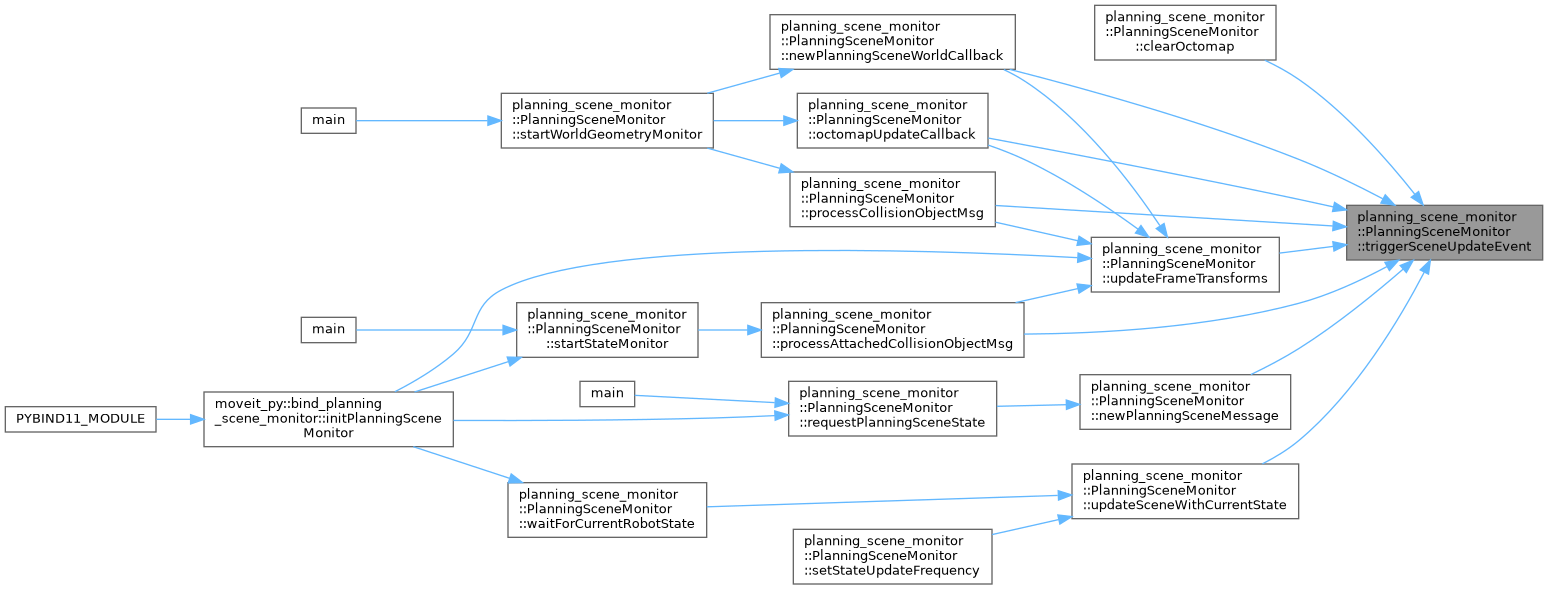
| void | triggerSceneUpdateEvent (SceneUpdateType update_type) |
| This function is called every time there is a change to the planning scene. | |
| bool | waitForCurrentRobotState (const rclcpp::Time &t, double wait_time=1.) |
| Wait for robot state to become more recent than time t. | |
| void | clearOctomap () |
| bool | newPlanningSceneMessage (const moveit_msgs::msg::PlanningScene &scene) |
| bool | processCollisionObjectMsg (const moveit_msgs::msg::CollisionObject::ConstSharedPtr &collision_object_msg, const std::optional< moveit_msgs::msg::ObjectColor > &color_msg=std::nullopt) |
| bool | processAttachedCollisionObjectMsg (const moveit_msgs::msg::AttachedCollisionObject::ConstSharedPtr &attached_collision_object_msg) |
Static Public Attributes | |
| static const std::string | DEFAULT_JOINT_STATES_TOPIC = "joint_states" |
| The name of the topic used by default for receiving joint states. | |
| static const std::string | DEFAULT_ATTACHED_COLLISION_OBJECT_TOPIC = "attached_collision_object" |
| The name of the topic used by default for attached collision objects. | |
| static const std::string | DEFAULT_COLLISION_OBJECT_TOPIC = "collision_object" |
| The name of the topic used by default for receiving collision objects in the world. | |
| static const std::string | DEFAULT_PLANNING_SCENE_WORLD_TOPIC = "planning_scene_world" |
| static const std::string | DEFAULT_PLANNING_SCENE_TOPIC = "planning_scene" |
| The name of the topic used by default for receiving full planning scenes or planning scene diffs. | |
| static const std::string | DEFAULT_PLANNING_SCENE_SERVICE = "get_planning_scene" |
| The name of the service used by default for requesting full planning scene state. | |
| static const std::string | MONITORED_PLANNING_SCENE_TOPIC = "monitored_planning_scene" |
Protected Types | |
| typedef std::map< const moveit::core::LinkModel *, std::vector< std::pair< occupancy_map_monitor::ShapeHandle, std::size_t > > > | LinkShapeHandles |
| using | AttachedBodyShapeHandles = std::map< const moveit::core::AttachedBody *, std::vector< std::pair< occupancy_map_monitor::ShapeHandle, std::size_t > > > |
| using | CollisionBodyShapeHandles = std::map< std::string, std::vector< std::pair< occupancy_map_monitor::ShapeHandle, const Eigen::Isometry3d * > > > |
Protected Member Functions | |
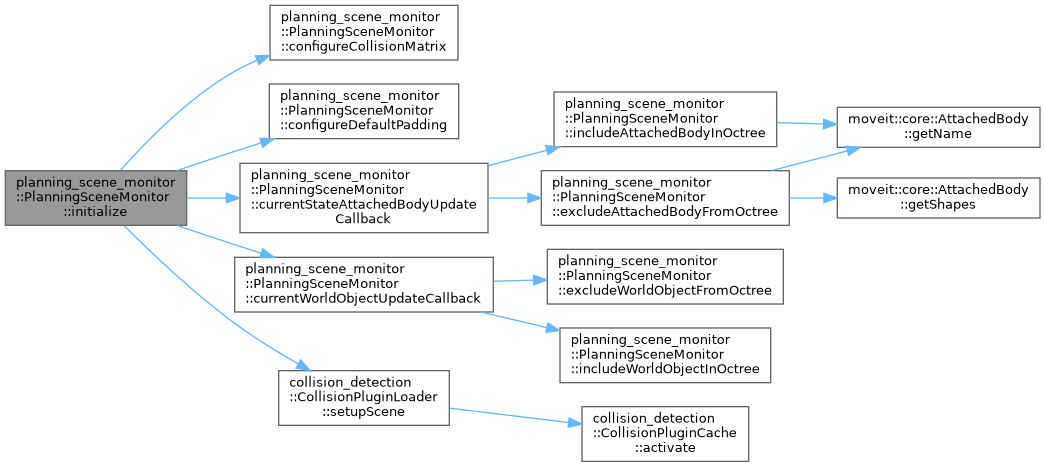
| void | initialize (const planning_scene::PlanningScenePtr &scene) |
| Initialize the planning scene monitor. | |
| void | lockSceneRead () |
| Lock the scene for reading (multiple threads can lock for reading at the same time) | |
| void | unlockSceneRead () |
| Unlock the scene from reading (multiple threads can lock for reading at the same time) | |
| void | lockSceneWrite () |
| Lock the scene for writing (only one thread can lock for writing and no other thread can lock for reading) | |
| void | unlockSceneWrite () |
| Lock the scene from writing (only one thread can lock for writing and no other thread can lock for reading) | |
| void | configureCollisionMatrix (const planning_scene::PlanningScenePtr &scene) |
| Configure the collision matrix for a particular scene. | |
| void | configureDefaultPadding () |
| Configure the default padding. | |
| void | newPlanningSceneWorldCallback (const moveit_msgs::msg::PlanningSceneWorld::ConstSharedPtr &world) |
| Callback for a new planning scene world. | |
| void | octomapUpdateCallback () |
| Callback for octomap updates. | |
| void | currentStateAttachedBodyUpdateCallback (moveit::core::AttachedBody *attached_body, bool just_attached) |
| Callback for a change for an attached object of the current state of the planning scene. | |
| void | currentWorldObjectUpdateCallback (const collision_detection::World::ObjectConstPtr &object, collision_detection::World::Action action) |
| Callback for a change in the world maintained by the planning scene. | |
| void | includeRobotLinksInOctree () |
| void | excludeRobotLinksFromOctree () |
| void | excludeWorldObjectsFromOctree () |
| void | includeWorldObjectsInOctree () |
| void | excludeWorldObjectFromOctree (const collision_detection::World::ObjectConstPtr &obj) |
| void | includeWorldObjectInOctree (const collision_detection::World::ObjectConstPtr &obj) |
| void | excludeAttachedBodiesFromOctree () |
| void | includeAttachedBodiesInOctree () |
| void | excludeAttachedBodyFromOctree (const moveit::core::AttachedBody *attached_body) |
| void | includeAttachedBodyInOctree (const moveit::core::AttachedBody *attached_body) |
| bool | getShapeTransformCache (const std::string &target_frame, const rclcpp::Time &target_time, occupancy_map_monitor::ShapeTransformCache &cache) const |
Protected Attributes | |
| std::string | monitor_name_ |
| The name of this scene monitor. | |
| planning_scene::PlanningScenePtr | scene_ |
| planning_scene::PlanningSceneConstPtr | scene_const_ |
| planning_scene::PlanningScenePtr | parent_scene_ |
| std::shared_mutex | scene_update_mutex_ |
| if diffs are monitored, this is the pointer to the parent scene | |
| rclcpp::Time | last_update_time_ |
| mutex for stored scene | |
| rclcpp::Time | last_robot_motion_time_ |
| Last time the state was updated. | |
| std::shared_ptr< rclcpp::Node > | node_ |
| Last time the robot has moved. | |
| std::shared_ptr< rclcpp::Node > | pnode_ |
| std::shared_ptr< rclcpp::executors::SingleThreadedExecutor > | private_executor_ |
| std::thread | private_executor_thread_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_buffer_ |
| std::shared_ptr< tf2_ros::TransformListener > | tf_listener_ |
| std::string | robot_description_ |
| double | default_robot_padd_ |
| default robot padding | |
| double | default_robot_scale_ |
| default robot scaling | |
| double | default_object_padd_ |
| default object padding | |
| double | default_attached_padd_ |
| default attached padding | |
| std::map< std::string, double > | default_robot_link_padd_ |
| default robot link padding | |
| std::map< std::string, double > | default_robot_link_scale_ |
| default robot link scale | |
| rclcpp::Publisher< moveit_msgs::msg::PlanningScene >::SharedPtr | planning_scene_publisher_ |
| std::unique_ptr< std::thread > | publish_planning_scene_ |
| double | publish_planning_scene_frequency_ |
| SceneUpdateType | publish_update_types_ |
| std::atomic< SceneUpdateType > | new_scene_update_ |
| std::condition_variable_any | new_scene_update_condition_ |
| rclcpp::Subscription< moveit_msgs::msg::PlanningScene >::SharedPtr | planning_scene_subscriber_ |
| rclcpp::Subscription< moveit_msgs::msg::PlanningSceneWorld >::SharedPtr | planning_scene_world_subscriber_ |
| rclcpp::Subscription< moveit_msgs::msg::AttachedCollisionObject >::SharedPtr | attached_collision_object_subscriber_ |
| rclcpp::Subscription< moveit_msgs::msg::CollisionObject >::SharedPtr | collision_object_subscriber_ |
| rclcpp::Service< moveit_msgs::srv::GetPlanningScene >::SharedPtr | get_scene_service_ |
| std::unique_ptr< occupancy_map_monitor::OccupancyMapMonitor > | octomap_monitor_ |
| CurrentStateMonitorPtr | current_state_monitor_ |
| LinkShapeHandles | link_shape_handles_ |
| AttachedBodyShapeHandles | attached_body_shape_handles_ |
| CollisionBodyShapeHandles | collision_body_shape_handles_ |
| std::recursive_mutex | shape_handles_lock_ |
| std::recursive_mutex | update_lock_ |
| lock access to update_callbacks_ | |
| std::vector< std::function< void(SceneUpdateType)> > | update_callbacks_ |
Friends | |
| class | LockedPlanningSceneRO |
| class | LockedPlanningSceneRW |
Detailed Description
PlanningSceneMonitor Subscribes to the topic planning_scene.
Definition at line 72 of file planning_scene_monitor.hpp.
Member Typedef Documentation
◆ AttachedBodyShapeHandles
|
protected |
Definition at line 536 of file planning_scene_monitor.hpp.
◆ CollisionBodyShapeHandles
|
protected |
Definition at line 538 of file planning_scene_monitor.hpp.
◆ LinkShapeHandles
|
protected |
Definition at line 535 of file planning_scene_monitor.hpp.
Member Enumeration Documentation
◆ SceneUpdateType
Definition at line 85 of file planning_scene_monitor.hpp.
Constructor & Destructor Documentation
◆ PlanningSceneMonitor() [1/5]
|
delete |
PlanningSceneMonitor cannot be copy-constructed.
◆ PlanningSceneMonitor() [2/5]
| planning_scene_monitor::PlanningSceneMonitor::PlanningSceneMonitor | ( | const rclcpp::Node::SharedPtr & | node, |
| const std::string & | robot_description, | ||
| const std::string & | name = "" |
||
| ) |
Constructor.
- Parameters
-
robot_description The name of the ROS parameter that contains the URDF (in string format) name A name identifying this planning scene monitor
Definition at line 78 of file planning_scene_monitor.cpp.
◆ PlanningSceneMonitor() [3/5]
| planning_scene_monitor::PlanningSceneMonitor::PlanningSceneMonitor | ( | const rclcpp::Node::SharedPtr & | node, |
| const robot_model_loader::RobotModelLoaderPtr & | rml, | ||
| const std::string & | name = "" |
||
| ) |
Constructor.
- Parameters
-
rml A pointer to a kinematic model loader name A name identifying this planning scene monitor
Definition at line 92 of file planning_scene_monitor.cpp.
◆ PlanningSceneMonitor() [4/5]
| planning_scene_monitor::PlanningSceneMonitor::PlanningSceneMonitor | ( | const rclcpp::Node::SharedPtr & | node, |
| const planning_scene::PlanningScenePtr & | scene, | ||
| const std::string & | robot_description, | ||
| const std::string & | name = "" |
||
| ) |
Constructor.
- Parameters
-
scene The scene instance to maintain up to date with monitored information robot_description The name of the ROS parameter that contains the URDF (in string format) name A name identifying this planning scene monitor
Definition at line 84 of file planning_scene_monitor.cpp.
◆ PlanningSceneMonitor() [5/5]
| planning_scene_monitor::PlanningSceneMonitor::PlanningSceneMonitor | ( | const rclcpp::Node::SharedPtr & | node, |
| const planning_scene::PlanningScenePtr & | scene, | ||
| const robot_model_loader::RobotModelLoaderPtr & | rml, | ||
| const std::string & | name = "" |
||
| ) |
Constructor.
- Parameters
-
scene The scene instance to maintain up to date with monitored information rml A pointer to a kinematic model loader name A name identifying this planning scene monitor
Definition at line 99 of file planning_scene_monitor.cpp.

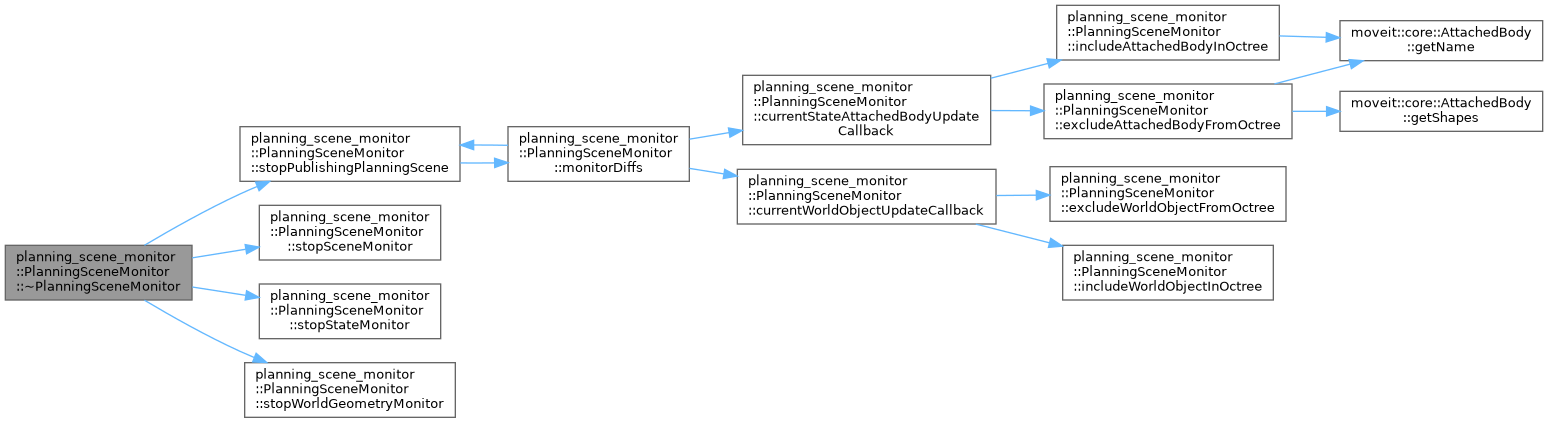
◆ ~PlanningSceneMonitor()
| planning_scene_monitor::PlanningSceneMonitor::~PlanningSceneMonitor | ( | ) |
Definition at line 132 of file planning_scene_monitor.cpp.
Member Function Documentation
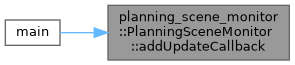
◆ addUpdateCallback()
| void planning_scene_monitor::PlanningSceneMonitor::addUpdateCallback | ( | const std::function< void(SceneUpdateType)> & | fn | ) |
Add a function to be called when an update to the scene is received.
Definition at line 1536 of file planning_scene_monitor.cpp.
◆ clearOctomap()
| void planning_scene_monitor::PlanningSceneMonitor::clearOctomap | ( | ) |
Definition at line 716 of file planning_scene_monitor.cpp.

◆ clearUpdateCallbacks()
| void planning_scene_monitor::PlanningSceneMonitor::clearUpdateCallbacks | ( | ) |
Clear the functions to be called when an update to the scene is received.
Definition at line 1543 of file planning_scene_monitor.cpp.
◆ configureCollisionMatrix()
|
protected |
Configure the collision matrix for a particular scene.
Definition at line 1605 of file planning_scene_monitor.cpp.

◆ configureDefaultPadding()
|
protected |
Configure the default padding.
Definition at line 1653 of file planning_scene_monitor.cpp.

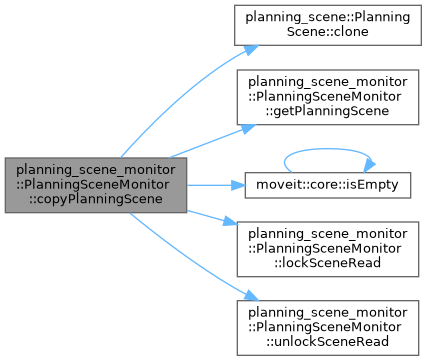
◆ copyPlanningScene()
| planning_scene::PlanningScenePtr planning_scene_monitor::PlanningSceneMonitor::copyPlanningScene | ( | const moveit_msgs::msg::PlanningScene & | diff = moveit_msgs::msg::PlanningScene() | ) |
Returns a copy of the current planning scene.
Definition at line 157 of file planning_scene_monitor.cpp.
◆ currentStateAttachedBodyUpdateCallback()
|
protected |
Callback for a change for an attached object of the current state of the planning scene.
Definition at line 1076 of file planning_scene_monitor.cpp.


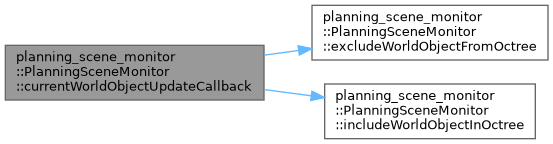
◆ currentWorldObjectUpdateCallback()
|
protected |
Callback for a change in the world maintained by the planning scene.
Definition at line 1092 of file planning_scene_monitor.cpp.

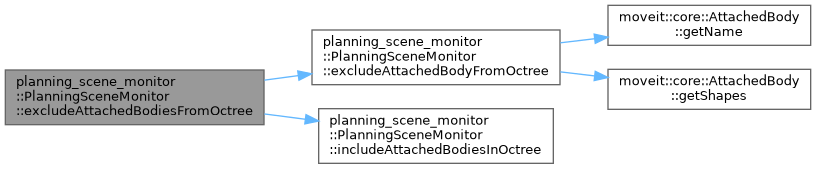
◆ excludeAttachedBodiesFromOctree()
|
protected |
Definition at line 958 of file planning_scene_monitor.cpp.

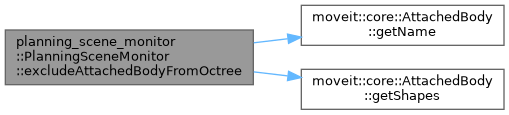
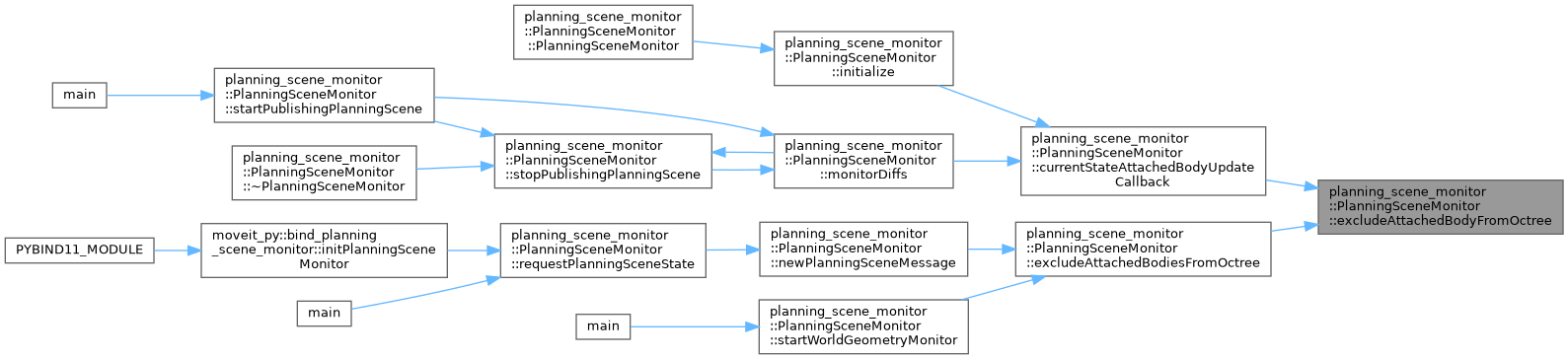
◆ excludeAttachedBodyFromOctree()
|
protected |
Definition at line 997 of file planning_scene_monitor.cpp.
◆ excludeRobotLinksFromOctree()
|
protected |
Definition at line 886 of file planning_scene_monitor.cpp.


◆ excludeWorldObjectFromOctree()
|
protected |
Definition at line 1036 of file planning_scene_monitor.cpp.

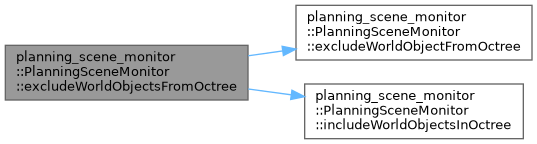
◆ excludeWorldObjectsFromOctree()
|
protected |
Definition at line 988 of file planning_scene_monitor.cpp.

◆ getDefaultAttachedObjectPadding()
|
inline |
Get the default attached padding.
Definition at line 245 of file planning_scene_monitor.hpp.
◆ getDefaultObjectPadding()
|
inline |
Get the default object padding.
Definition at line 239 of file planning_scene_monitor.hpp.
◆ getDefaultRobotPadding()
|
inline |
Get the default robot padding.
Definition at line 227 of file planning_scene_monitor.hpp.
◆ getDefaultRobotScale()
|
inline |
Get the default robot scaling.
Definition at line 233 of file planning_scene_monitor.hpp.
◆ getLastUpdateTime()
|
inline |
Return the time when the last update was made to the planning scene (by any monitor)
Definition at line 386 of file planning_scene_monitor.hpp.
◆ getMonitoredTopics()
| void planning_scene_monitor::PlanningSceneMonitor::getMonitoredTopics | ( | std::vector< std::string > & | topics | ) | const |
Get the topic names that the monitor is listening to.
Definition at line 557 of file planning_scene_monitor.cpp.
◆ getName()
|
inline |
Get the name of this monitor.
Definition at line 160 of file planning_scene_monitor.hpp.

◆ getPlanningScene() [1/2]
|
inline |
Avoid this function! Returns an unsafe pointer to the current planning scene.
- Warning
- Most likely you do not want to call this function directly. PlanningSceneMonitor has a background thread which repeatedly updates and clobbers various contents of its internal PlanningScene instance. This function just returns a pointer to that dynamic internal object. The correct thing is usually to use a LockedPlanningSceneRO or LockedPlanningSceneRW, which locks the PlanningSceneMonitor and provides safe access to the PlanningScene object.
- Returns
- A pointer to the current planning scene.
Definition at line 190 of file planning_scene_monitor.hpp.
◆ getPlanningScene() [2/2]
|
inline |
Avoid this function! Returns an unsafe pointer to the current planning scene.
- Warning
- Most likely you do not want to call this function directly. PlanningSceneMonitor has a background thread which repeatedly updates and clobbers various contents of its internal PlanningScene instance. This function just returns a pointer to that dynamic internal object. The correct thing is usually to use a LockedPlanningSceneRO or LockedPlanningSceneRW, which locks the PlanningSceneMonitor and provides safe access to the PlanningScene object.
- Returns
- A pointer to the current planning scene.
Definition at line 198 of file planning_scene_monitor.hpp.
◆ getPlanningScenePublishingFrequency()
|
inline |
Get the maximum frequency at which planning scenes are published (Hz)
Definition at line 276 of file planning_scene_monitor.hpp.
◆ getRobotDescription()
|
inline |
Get the stored robot description.
- Returns
- An instance of the stored robot description
Definition at line 221 of file planning_scene_monitor.hpp.
◆ getRobotModel()
|
inline |
Definition at line 171 of file planning_scene_monitor.hpp.
◆ getRobotModelLoader()
|
inline |
Get the user kinematic model loader.
Definition at line 166 of file planning_scene_monitor.hpp.
◆ getShapeTransformCache()
|
protected |
Definition at line 1222 of file planning_scene_monitor.cpp.

◆ getStateMonitor()
|
inline |
Get the stored instance of the stored current state monitor.
- Returns
- An instance of the stored current state monitor
Definition at line 283 of file planning_scene_monitor.hpp.
◆ getStateMonitorNonConst()
|
inline |
Definition at line 288 of file planning_scene_monitor.hpp.
◆ getStateUpdateFrequency()
|
inline |
Get the maximum frequency (Hz) at which the current state of the planning scene is updated.
Definition at line 323 of file planning_scene_monitor.hpp.
◆ getTFClient()
|
inline |
Get the instance of the TF client that was passed to the constructor of this class.
Definition at line 251 of file planning_scene_monitor.hpp.
◆ includeAttachedBodiesInOctree()
|
protected |
Definition at line 940 of file planning_scene_monitor.cpp.

◆ includeAttachedBodyInOctree()
|
protected |
Definition at line 1019 of file planning_scene_monitor.cpp.


◆ includeRobotLinksInOctree()
|
protected |
Definition at line 923 of file planning_scene_monitor.cpp.

◆ includeWorldObjectInOctree()
|
protected |
Definition at line 1059 of file planning_scene_monitor.cpp.

◆ includeWorldObjectsInOctree()
|
protected |
Definition at line 970 of file planning_scene_monitor.cpp.

◆ initialize()
|
protected |
Initialize the planning scene monitor.
- Parameters
-
scene The scene instance to fill with data (an instance is allocated if the one passed in is not allocated)
Definition at line 170 of file planning_scene_monitor.cpp.

◆ lockSceneRead()
|
protected |
Lock the scene for reading (multiple threads can lock for reading at the same time)
Definition at line 1169 of file planning_scene_monitor.cpp.

◆ lockSceneWrite()
|
protected |
Lock the scene for writing (only one thread can lock for writing and no other thread can lock for reading)
Definition at line 1183 of file planning_scene_monitor.cpp.

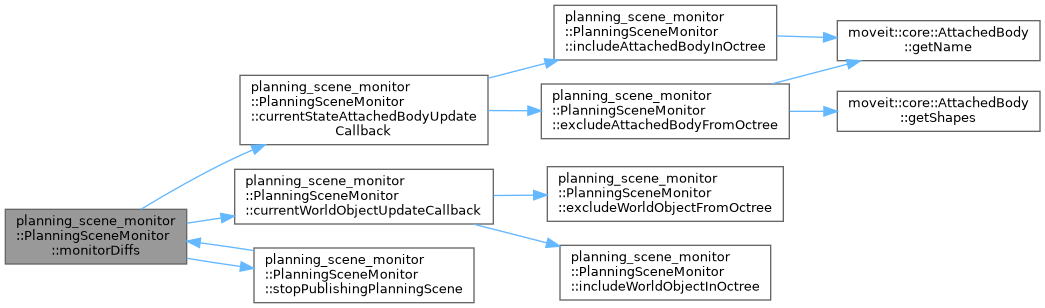
◆ monitorDiffs()
| void planning_scene_monitor::PlanningSceneMonitor::monitorDiffs | ( | bool | flag | ) |
By default, the maintained planning scene does not reason about diffs. When the flag passed in is true, the maintained scene starts counting diffs. Future updates to the planning scene will be stored as diffs and can be retrieved as such. Setting the flag to false restores the default behaviour. Maintaining diffs is automatically enabled when publishing planning scenes.
Definition at line 376 of file planning_scene_monitor.cpp.

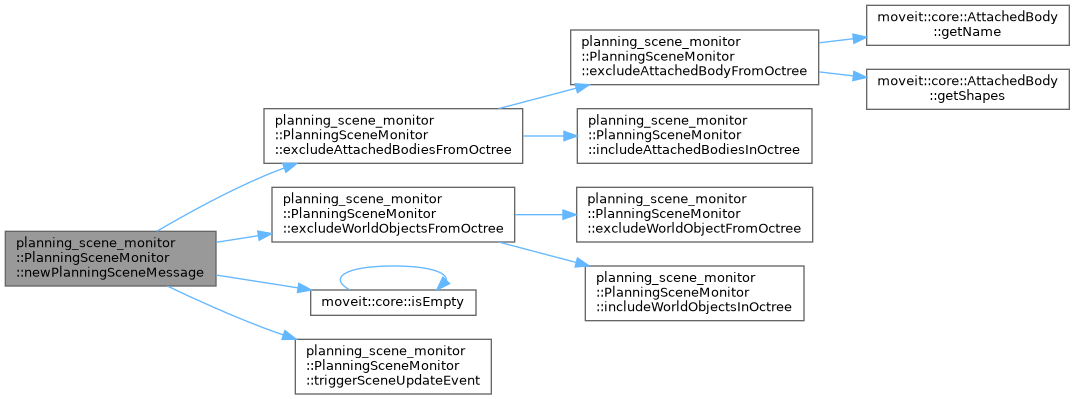
◆ newPlanningSceneMessage()
| bool planning_scene_monitor::PlanningSceneMonitor::newPlanningSceneMessage | ( | const moveit_msgs::msg::PlanningScene & | scene | ) |
Definition at line 739 of file planning_scene_monitor.cpp.

◆ newPlanningSceneWorldCallback()
|
protected |
Callback for a new planning scene world.
Definition at line 861 of file planning_scene_monitor.cpp.


◆ octomapUpdateCallback()
|
protected |
Callback for octomap updates.
Definition at line 1429 of file planning_scene_monitor.cpp.


◆ operator=()
|
delete |
PlanningSceneMonitor cannot be copy-assigned.
◆ processAttachedCollisionObjectMsg()
| bool planning_scene_monitor::PlanningSceneMonitor::processAttachedCollisionObjectMsg | ( | const moveit_msgs::msg::AttachedCollisionObject::ConstSharedPtr & | attached_collision_object_msg | ) |
Definition at line 841 of file planning_scene_monitor.cpp.


◆ processCollisionObjectMsg()
| bool planning_scene_monitor::PlanningSceneMonitor::processCollisionObjectMsg | ( | const moveit_msgs::msg::CollisionObject::ConstSharedPtr & | collision_object_msg, |
| const std::optional< moveit_msgs::msg::ObjectColor > & | color_msg = std::nullopt |
||
| ) |
Definition at line 821 of file planning_scene_monitor.cpp.


◆ providePlanningSceneService()
| void planning_scene_monitor::PlanningSceneMonitor::providePlanningSceneService | ( | const std::string & | service_name = DEFAULT_PLANNING_SCENE_SERVICE | ) |
Create an optional service for getting the complete planning scene This is useful for satisfying the Rviz PlanningScene display's need for a service without having to use a move_group node. Be careful not to use this in conjunction with requestPlanningSceneState(), as it will create a pointless feedback loop.
- Parameters
-
service_name The topic to provide the service
Definition at line 658 of file planning_scene_monitor.cpp.
◆ publishDebugInformation()
| void planning_scene_monitor::PlanningSceneMonitor::publishDebugInformation | ( | bool | flag | ) |
Definition at line 1599 of file planning_scene_monitor.cpp.
◆ requestPlanningSceneState()
| bool planning_scene_monitor::PlanningSceneMonitor::requestPlanningSceneState | ( | const std::string & | service_name = DEFAULT_PLANNING_SCENE_SERVICE | ) |
Request a full planning scene state using a service call Be careful not to use this in conjunction with providePlanningSceneService(), as it will create a pointless feedback loop.
- Parameters
-
service_name The name of the service to use for requesting the planning scene. This must be a service of type moveit_msgs::srv::GetPlanningScene and is usually called "/get_planning_scene".
Definition at line 613 of file planning_scene_monitor.cpp.


◆ setPlanningScenePublishingFrequency()
| void planning_scene_monitor::PlanningSceneMonitor::setPlanningScenePublishingFrequency | ( | double | hz | ) |
Set the maximum frequency at which planning scenes are being published.
Definition at line 1549 of file planning_scene_monitor.cpp.
◆ setStateUpdateFrequency()
| void planning_scene_monitor::PlanningSceneMonitor::setStateUpdateFrequency | ( | double | hz | ) |
Update the scene using the monitored state at a specified frequency, in Hz. This function has an effect only when updates from the CurrentStateMonitor are received at a higher frequency. In that case, the updates are throttled down, so that they do not exceed a maximum update frequency specified here.
- Parameters
-
hz the update frequency. By default this is 10Hz.
Definition at line 1453 of file planning_scene_monitor.cpp.

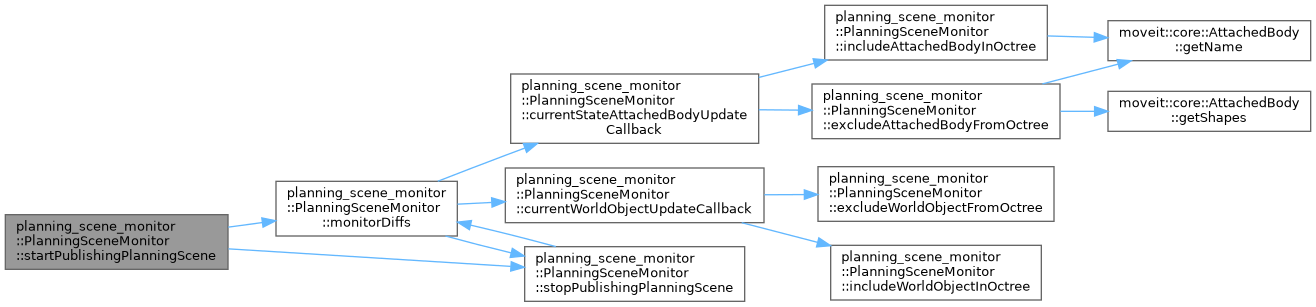
◆ startPublishingPlanningScene()
| void planning_scene_monitor::PlanningSceneMonitor::startPublishingPlanningScene | ( | SceneUpdateType | event, |
| const std::string & | planning_scene_topic = MONITORED_PLANNING_SCENE_TOPIC |
||
| ) |
Start publishing the maintained planning scene. The first message set out is a complete planning scene. Diffs are sent afterwards on updates specified by the event bitmask. For UPDATE_SCENE, the full scene is always sent.
Definition at line 439 of file planning_scene_monitor.cpp.

◆ startSceneMonitor()
| void planning_scene_monitor::PlanningSceneMonitor::startSceneMonitor | ( | const std::string & | scene_topic = DEFAULT_PLANNING_SCENE_TOPIC | ) |
Start the scene monitor (ROS topic-based)
- Parameters
-
scene_topic The name of the planning scene topic
Definition at line 1197 of file planning_scene_monitor.cpp.


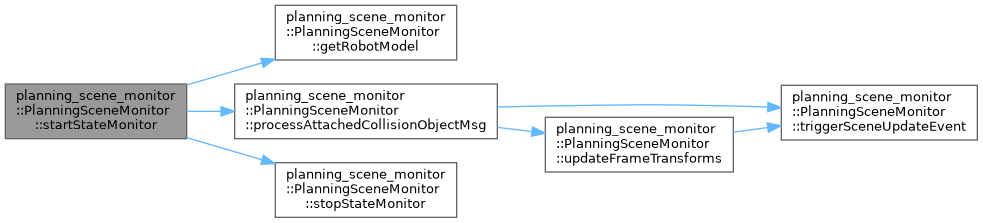
◆ startStateMonitor()
| void planning_scene_monitor::PlanningSceneMonitor::startStateMonitor | ( | const std::string & | joint_states_topic = DEFAULT_JOINT_STATES_TOPIC, |
| const std::string & | attached_objects_topic = DEFAULT_ATTACHED_COLLISION_OBJECT_TOPIC |
||
| ) |
Start the current state monitor.
- Parameters
-
joint_states_topic the topic to listen to for joint states attached_objects_topic the topic to listen to for attached collision objects
Definition at line 1355 of file planning_scene_monitor.cpp.

◆ startWorldGeometryMonitor()
| void planning_scene_monitor::PlanningSceneMonitor::startWorldGeometryMonitor | ( | const std::string & | collision_objects_topic = DEFAULT_COLLISION_OBJECT_TOPIC, |
| const std::string & | planning_scene_world_topic = DEFAULT_PLANNING_SCENE_WORLD_TOPIC, |
||
| const bool | load_octomap_monitor = true |
||
| ) |
Start the OccupancyMapMonitor and listening for:
- Requests to add/remove/update collision objects to/from the world
- The collision map
- Requests to attached/detach collision objects
- Parameters
-
collision_objects_topic The topic on which to listen for collision objects planning_scene_world_topic The topic to listen to for world scene geometry load_octomap_monitor Flag to disable octomap monitor if desired
Definition at line 1291 of file planning_scene_monitor.cpp.


◆ stopPublishingPlanningScene()
| void planning_scene_monitor::PlanningSceneMonitor::stopPublishingPlanningScene | ( | ) |
Stop publishing the maintained planning scene.
Definition at line 425 of file planning_scene_monitor.cpp.

◆ stopSceneMonitor()
| void planning_scene_monitor::PlanningSceneMonitor::stopSceneMonitor | ( | ) |
Stop the scene monitor.
Definition at line 1213 of file planning_scene_monitor.cpp.

◆ stopStateMonitor()
| void planning_scene_monitor::PlanningSceneMonitor::stopStateMonitor | ( | ) |
Stop the state monitor.
Definition at line 1397 of file planning_scene_monitor.cpp.
◆ stopWorldGeometryMonitor()
| void planning_scene_monitor::PlanningSceneMonitor::stopWorldGeometryMonitor | ( | ) |
Stop the world geometry monitor.
Definition at line 1339 of file planning_scene_monitor.cpp.
◆ triggerSceneUpdateEvent()
| void planning_scene_monitor::PlanningSceneMonitor::triggerSceneUpdateEvent | ( | SceneUpdateType | update_type | ) |
This function is called every time there is a change to the planning scene.
Definition at line 602 of file planning_scene_monitor.cpp.
◆ unlockSceneRead()
|
protected |
Unlock the scene from reading (multiple threads can lock for reading at the same time)
Definition at line 1176 of file planning_scene_monitor.cpp.

◆ unlockSceneWrite()
|
protected |
Lock the scene from writing (only one thread can lock for writing and no other thread can lock for reading)
Definition at line 1190 of file planning_scene_monitor.cpp.

◆ updateFrameTransforms()
| void planning_scene_monitor::PlanningSceneMonitor::updateFrameTransforms | ( | ) |
Update the transforms for the frames that are not part of the kinematic model using tf. Examples of these frames are the "map" and "odom_combined" transforms. This function is automatically called when data that uses transforms is received. However, this function should also be called before starting a planning request, for example.
Definition at line 1584 of file planning_scene_monitor.cpp.


◆ updateSceneWithCurrentState()
| void planning_scene_monitor::PlanningSceneMonitor::updateSceneWithCurrentState | ( | bool | skip_update_if_locked = false | ) |
Update the scene using the monitored state. This function is automatically called when an update to the current state is received (if startStateMonitor() has been called). The updates are throttled to a maximum update frequency however, which is set by setStateUpdateFrequency().
- Parameters
-
skip_update_if_locked causes the update to be skipped if the planning scene is locked.
Definition at line 1482 of file planning_scene_monitor.cpp.


◆ updatesScene() [1/2]
| bool planning_scene_monitor::PlanningSceneMonitor::updatesScene | ( | const planning_scene::PlanningSceneConstPtr & | scene | ) | const |
Return true if the scene scene can be updated directly or indirectly by this monitor. This function will return true if the pointer of the scene is the same as the one maintained, or if a parent of the scene is the one maintained.
Definition at line 597 of file planning_scene_monitor.cpp.
◆ updatesScene() [2/2]
| bool planning_scene_monitor::PlanningSceneMonitor::updatesScene | ( | const planning_scene::PlanningScenePtr & | scene | ) | const |
Return true if the scene scene can be updated directly or indirectly by this monitor. This function will return true if the pointer of the scene is the same as the one maintained, or if a parent of the scene is the one maintained.
Definition at line 592 of file planning_scene_monitor.cpp.
◆ waitForCurrentRobotState()
| bool planning_scene_monitor::PlanningSceneMonitor::waitForCurrentRobotState | ( | const rclcpp::Time & | t, |
| double | wait_time = 1. |
||
| ) |
Wait for robot state to become more recent than time t.
If there is no state monitor active, there will be no scene updates. Hence, you can specify a timeout to wait for those updates. Default is 1s.
Definition at line 1115 of file planning_scene_monitor.cpp.


Friends And Related Symbol Documentation
◆ LockedPlanningSceneRO
|
friend |
Definition at line 607 of file planning_scene_monitor.hpp.
◆ LockedPlanningSceneRW
|
friend |
Definition at line 608 of file planning_scene_monitor.hpp.
Member Data Documentation
◆ attached_body_shape_handles_
|
protected |
Definition at line 542 of file planning_scene_monitor.hpp.
◆ attached_collision_object_subscriber_
|
protected |
Definition at line 520 of file planning_scene_monitor.hpp.
◆ collision_body_shape_handles_
|
protected |
Definition at line 543 of file planning_scene_monitor.hpp.
◆ collision_object_subscriber_
|
protected |
Definition at line 521 of file planning_scene_monitor.hpp.
◆ current_state_monitor_
|
protected |
Definition at line 531 of file planning_scene_monitor.hpp.
◆ DEFAULT_ATTACHED_COLLISION_OBJECT_TOPIC
|
static |
The name of the topic used by default for attached collision objects.
Definition at line 108 of file planning_scene_monitor.hpp.
◆ default_attached_padd_
|
protected |
default attached padding
Definition at line 502 of file planning_scene_monitor.hpp.
◆ DEFAULT_COLLISION_OBJECT_TOPIC
|
static |
The name of the topic used by default for receiving collision objects in the world.
Definition at line 111 of file planning_scene_monitor.hpp.
◆ DEFAULT_JOINT_STATES_TOPIC
|
static |
The name of the topic used by default for receiving joint states.
Definition at line 105 of file planning_scene_monitor.hpp.
◆ default_object_padd_
|
protected |
default object padding
Definition at line 500 of file planning_scene_monitor.hpp.
◆ DEFAULT_PLANNING_SCENE_SERVICE
|
static |
The name of the service used by default for requesting full planning scene state.
Definition at line 121 of file planning_scene_monitor.hpp.
◆ DEFAULT_PLANNING_SCENE_TOPIC
|
static |
The name of the topic used by default for receiving full planning scenes or planning scene diffs.
Definition at line 118 of file planning_scene_monitor.hpp.
◆ DEFAULT_PLANNING_SCENE_WORLD_TOPIC
|
static |
The name of the topic used by default for receiving geometry information about a planning scene (complete overwrite of world geometry)
Definition at line 115 of file planning_scene_monitor.hpp.
◆ default_robot_link_padd_
|
protected |
default robot link padding
Definition at line 504 of file planning_scene_monitor.hpp.
◆ default_robot_link_scale_
|
protected |
default robot link scale
Definition at line 506 of file planning_scene_monitor.hpp.
◆ default_robot_padd_
|
protected |
default robot padding
Definition at line 496 of file planning_scene_monitor.hpp.
◆ default_robot_scale_
|
protected |
default robot scaling
Definition at line 498 of file planning_scene_monitor.hpp.
◆ get_scene_service_
|
protected |
Definition at line 525 of file planning_scene_monitor.hpp.
◆ last_robot_motion_time_
|
protected |
Last time the state was updated.
Definition at line 479 of file planning_scene_monitor.hpp.
◆ last_update_time_
|
protected |
mutex for stored scene
Definition at line 478 of file planning_scene_monitor.hpp.
◆ link_shape_handles_
|
protected |
Definition at line 541 of file planning_scene_monitor.hpp.
◆ monitor_name_
|
protected |
The name of this scene monitor.
Definition at line 472 of file planning_scene_monitor.hpp.
◆ MONITORED_PLANNING_SCENE_TOPIC
|
static |
The name of the topic used by default for publishing the monitored planning scene (this is without "/" in the name, so the topic is prefixed by the node name)
Definition at line 125 of file planning_scene_monitor.hpp.
◆ new_scene_update_
|
protected |
Definition at line 513 of file planning_scene_monitor.hpp.
◆ new_scene_update_condition_
|
protected |
Definition at line 514 of file planning_scene_monitor.hpp.
◆ node_
|
protected |
Last time the robot has moved.
Definition at line 481 of file planning_scene_monitor.hpp.
◆ octomap_monitor_
|
protected |
Definition at line 528 of file planning_scene_monitor.hpp.
◆ parent_scene_
|
protected |
Definition at line 476 of file planning_scene_monitor.hpp.
◆ planning_scene_publisher_
|
protected |
Definition at line 509 of file planning_scene_monitor.hpp.
◆ planning_scene_subscriber_
|
protected |
Definition at line 517 of file planning_scene_monitor.hpp.
◆ planning_scene_world_subscriber_
|
protected |
Definition at line 518 of file planning_scene_monitor.hpp.
◆ pnode_
|
protected |
Definition at line 486 of file planning_scene_monitor.hpp.
◆ private_executor_
|
protected |
Definition at line 487 of file planning_scene_monitor.hpp.
◆ private_executor_thread_
|
protected |
Definition at line 488 of file planning_scene_monitor.hpp.
◆ publish_planning_scene_
|
protected |
Definition at line 510 of file planning_scene_monitor.hpp.
◆ publish_planning_scene_frequency_
|
protected |
Definition at line 511 of file planning_scene_monitor.hpp.
◆ publish_update_types_
|
protected |
Definition at line 512 of file planning_scene_monitor.hpp.
◆ robot_description_
|
protected |
Definition at line 493 of file planning_scene_monitor.hpp.
◆ scene_
|
protected |
Definition at line 474 of file planning_scene_monitor.hpp.
◆ scene_const_
|
protected |
Definition at line 475 of file planning_scene_monitor.hpp.
◆ scene_update_mutex_
|
protected |
if diffs are monitored, this is the pointer to the parent scene
Definition at line 477 of file planning_scene_monitor.hpp.
◆ shape_handles_lock_
|
mutableprotected |
Definition at line 544 of file planning_scene_monitor.hpp.
◆ tf_buffer_
|
protected |
Definition at line 490 of file planning_scene_monitor.hpp.
◆ tf_listener_
|
protected |
Definition at line 491 of file planning_scene_monitor.hpp.
◆ update_callbacks_
|
protected |
Definition at line 548 of file planning_scene_monitor.hpp.
◆ update_lock_
|
protected |
lock access to update_callbacks_
Definition at line 547 of file planning_scene_monitor.hpp.
The documentation for this class was generated from the following files:
- moveit_ros/planning/planning_scene_monitor/include/moveit/planning_scene_monitor/planning_scene_monitor.hpp
- moveit_ros/planning/planning_scene_monitor/src/planning_scene_monitor.cpp