#include <motion_planning_frame_joints_widget.hpp>
◆ MotionPlanningFrameJointsWidget() [1/2]
◆ MotionPlanningFrameJointsWidget() [2/2]
| moveit_rviz_plugin::MotionPlanningFrameJointsWidget::MotionPlanningFrameJointsWidget |
( |
MotionPlanningDisplay * |
display, |
|
|
QWidget * |
parent = nullptr |
|
) |
| |
◆ ~MotionPlanningFrameJointsWidget()
| moveit_rviz_plugin::MotionPlanningFrameJointsWidget::~MotionPlanningFrameJointsWidget |
( |
| ) |
|
|
override |
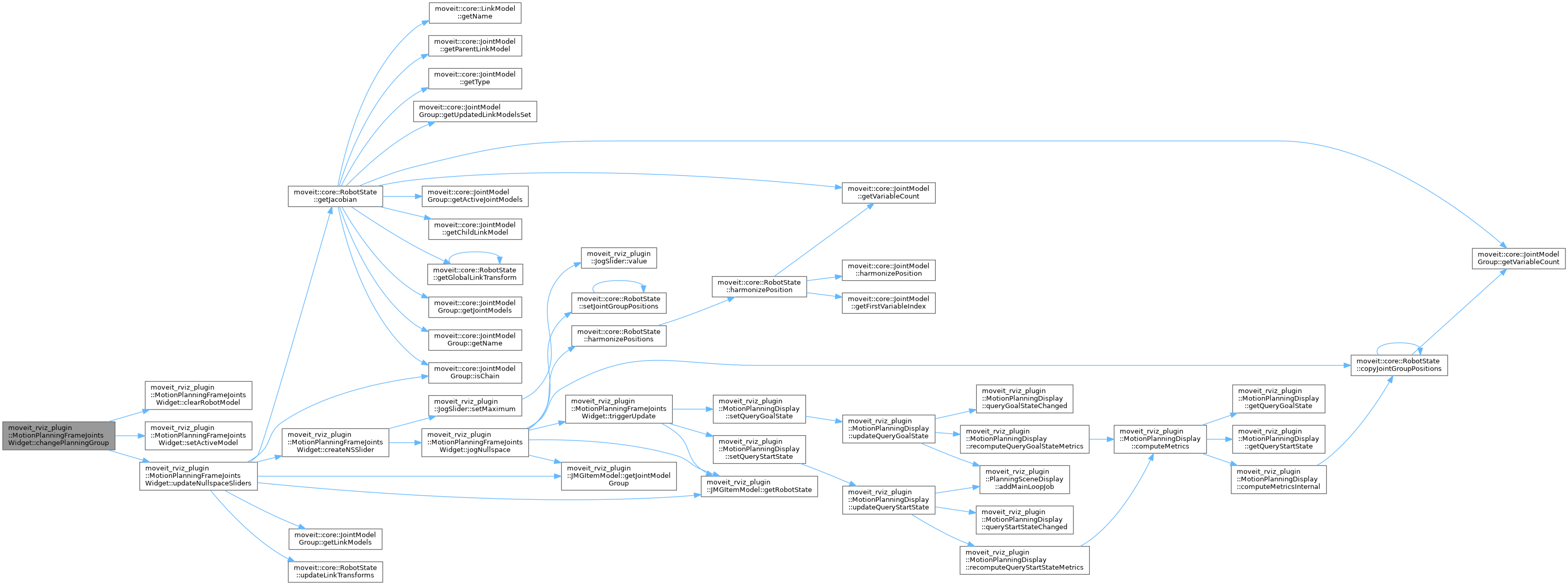
◆ changePlanningGroup()
| void moveit_rviz_plugin::MotionPlanningFrameJointsWidget::changePlanningGroup |
( |
const std::string & |
group_name, |
|
|
const robot_interaction::InteractionHandlerPtr & |
start_state_handler, |
|
|
const robot_interaction::InteractionHandlerPtr & |
goal_state_handler |
|
) |
| |
◆ clearRobotModel()
| void moveit_rviz_plugin::MotionPlanningFrameJointsWidget::clearRobotModel |
( |
| ) |
|
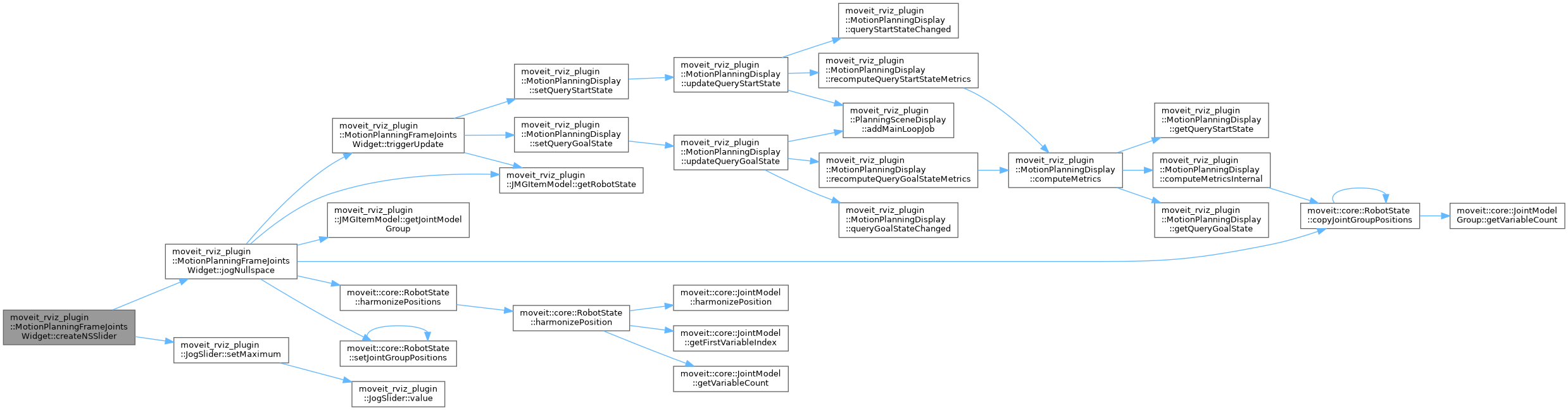
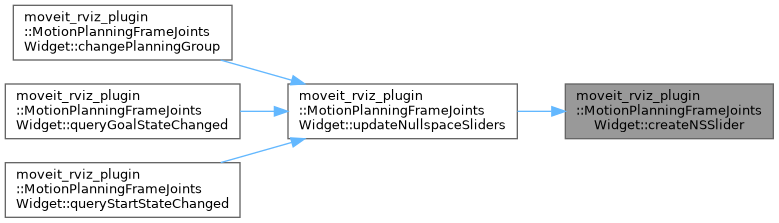
◆ createNSSlider()
| QSlider * moveit_rviz_plugin::MotionPlanningFrameJointsWidget::createNSSlider |
( |
int |
i | ) |
|
|
protected |
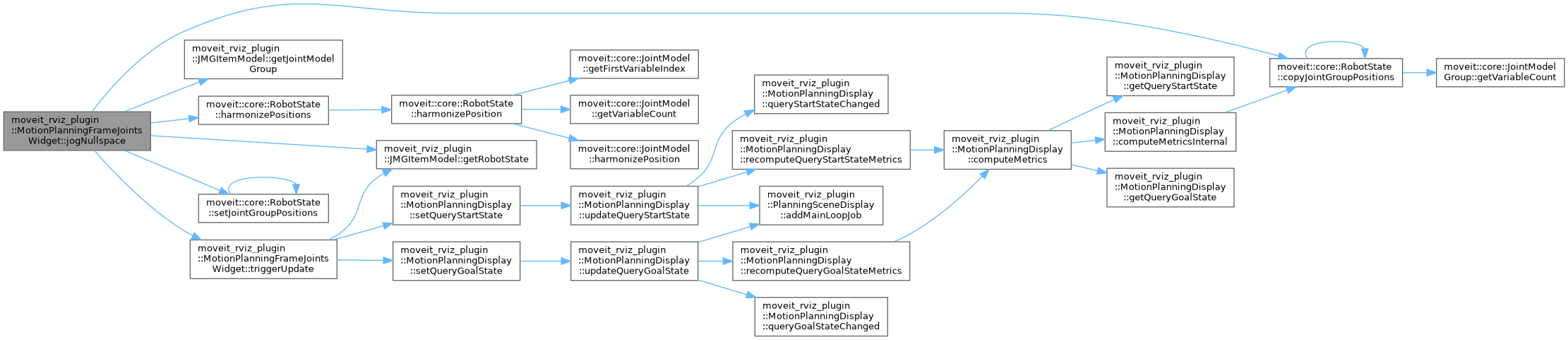
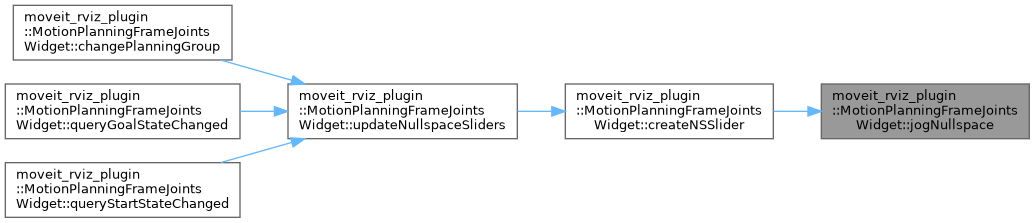
◆ jogNullspace
| void moveit_rviz_plugin::MotionPlanningFrameJointsWidget::jogNullspace |
( |
double |
value | ) |
|
|
slot |
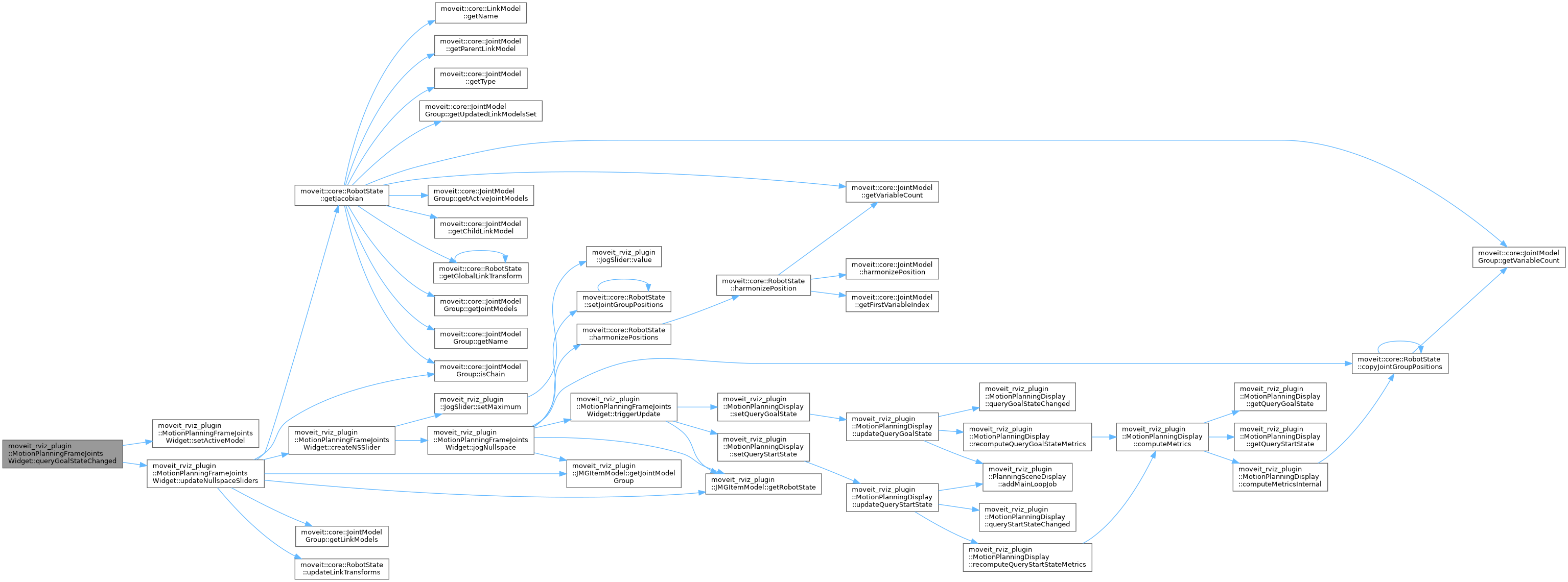
◆ queryGoalStateChanged
| void moveit_rviz_plugin::MotionPlanningFrameJointsWidget::queryGoalStateChanged |
( |
| ) |
|
|
slot |
◆ queryStartStateChanged
| void moveit_rviz_plugin::MotionPlanningFrameJointsWidget::queryStartStateChanged |
( |
| ) |
|
|
slot |
◆ setActiveModel()
| void moveit_rviz_plugin::MotionPlanningFrameJointsWidget::setActiveModel |
( |
JMGItemModel * |
model | ) |
|
|
protected |
◆ triggerUpdate()
| void moveit_rviz_plugin::MotionPlanningFrameJointsWidget::triggerUpdate |
( |
JMGItemModel * |
model | ) |
|
|
protected |
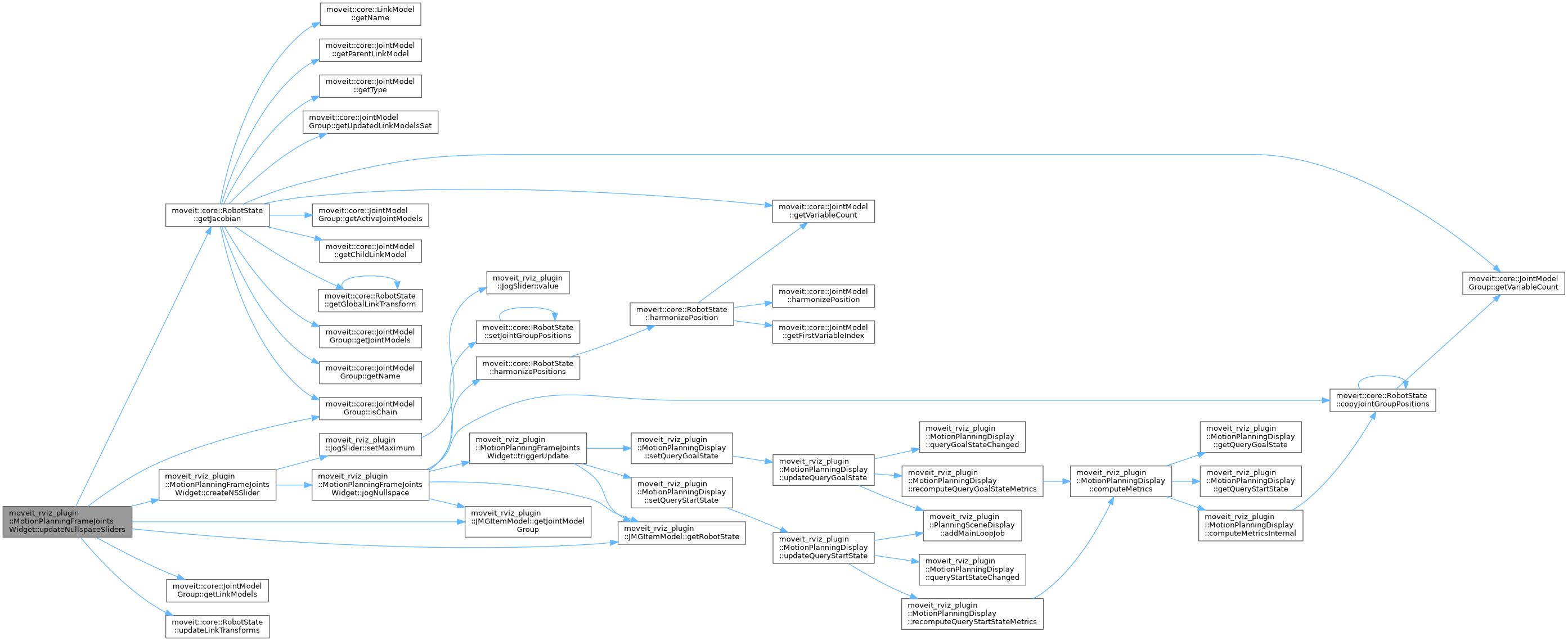
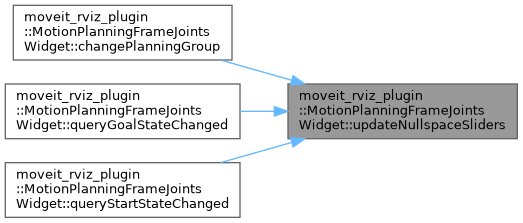
◆ updateNullspaceSliders()
| void moveit_rviz_plugin::MotionPlanningFrameJointsWidget::updateNullspaceSliders |
( |
| ) |
|
|
protected |
The documentation for this class was generated from the following files: