#include <motion_planning_display.hpp>

Signals | |
| void | queryStartStateChanged () |
| void | queryGoalStateChanged () |
Public Member Functions | |
| MotionPlanningDisplay () | |
| ~MotionPlanningDisplay () override | |
| void | load (const rviz_common::Config &config) override |
| void | save (rviz_common::Config config) const override |
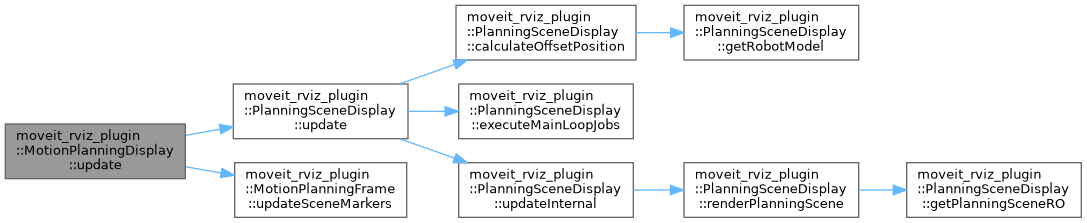
| void | update (float wall_dt, float ros_dt) override |
| void | reset () override |
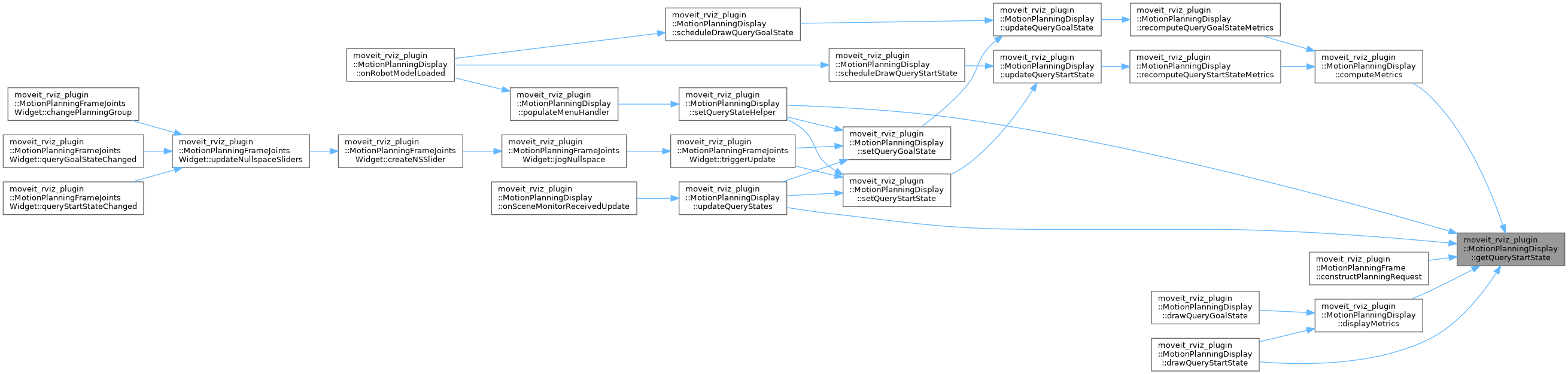
| moveit::core::RobotStateConstPtr | getQueryStartState () const |
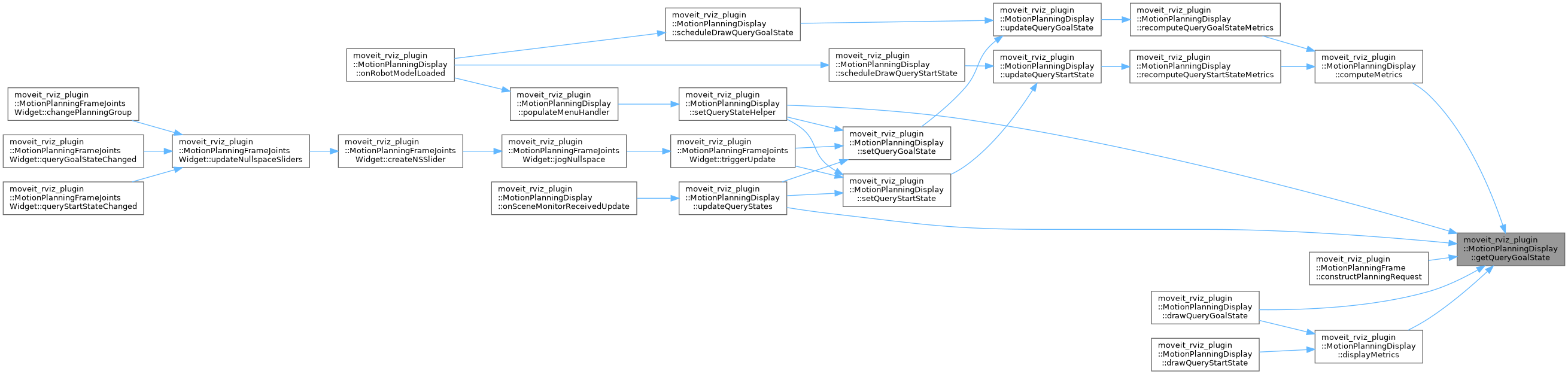
| moveit::core::RobotStateConstPtr | getQueryGoalState () const |
| const moveit::core::RobotState & | getPreviousState () const |
| const robot_interaction::RobotInteractionPtr & | getRobotInteraction () const |
| const robot_interaction::InteractionHandlerPtr & | getQueryStartStateHandler () const |
| const robot_interaction::InteractionHandlerPtr & | getQueryGoalStateHandler () const |
| void | dropVisualizedTrajectory () |
| void | setQueryStartState (const moveit::core::RobotState &start) |
| void | setQueryGoalState (const moveit::core::RobotState &goal) |
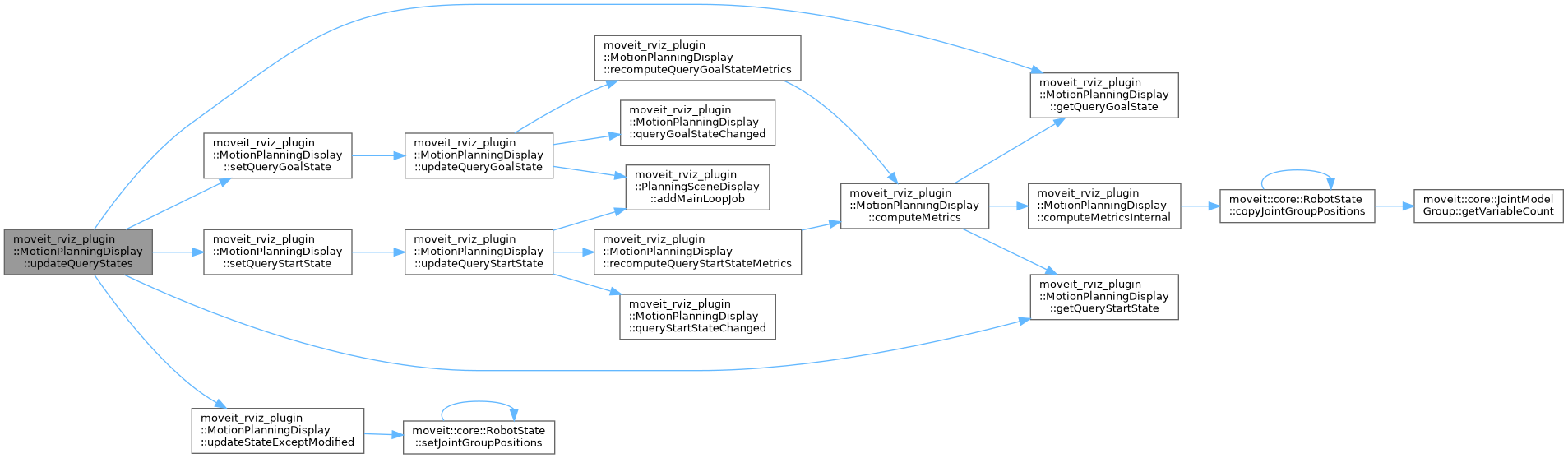
| void | updateQueryStates (const moveit::core::RobotState ¤t_state) |
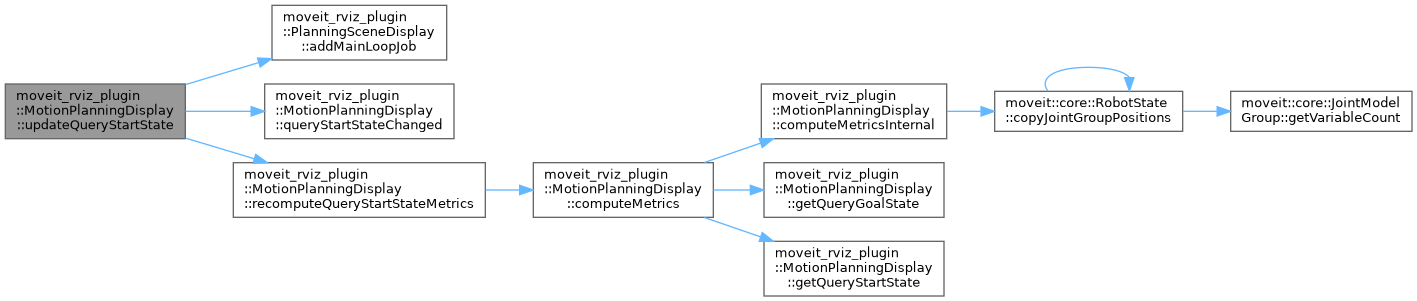
| void | updateQueryStartState () |
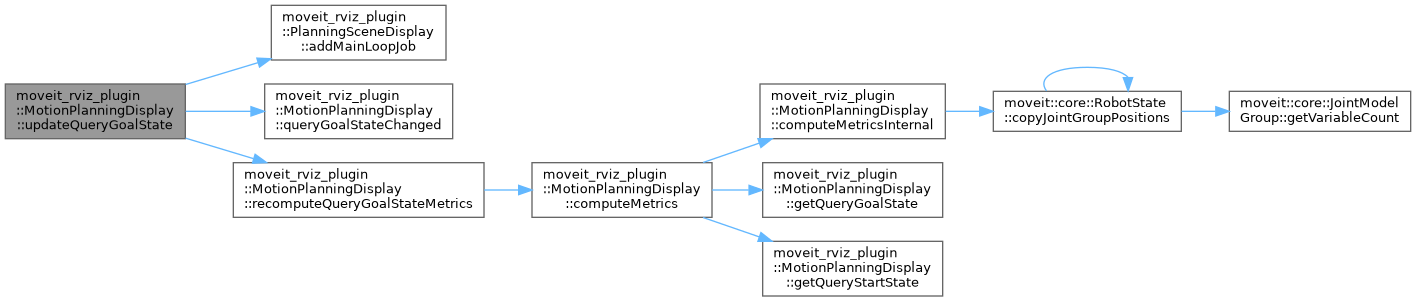
| void | updateQueryGoalState () |
| void | rememberPreviousStartState () |
| void | useApproximateIK (bool flag) |
| void | clearPlaceLocationsDisplay () |
| void | visualizePlaceLocations (const std::vector< geometry_msgs::msg::PoseStamped > &place_poses) |
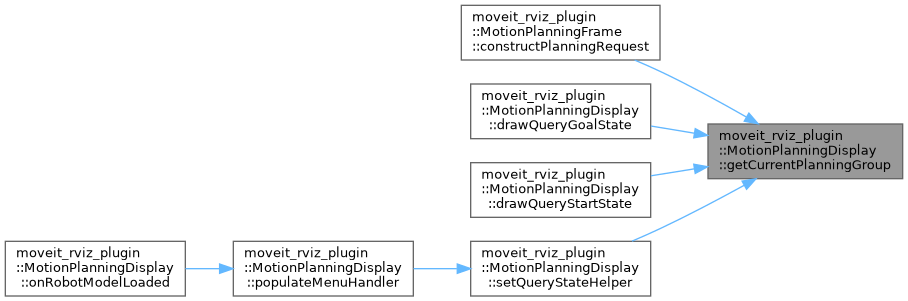
| std::string | getCurrentPlanningGroup () const |
| void | changePlanningGroup (const std::string &group) |
| void | addStatusText (const std::string &text) |
| void | addStatusText (const std::vector< std::string > &text) |
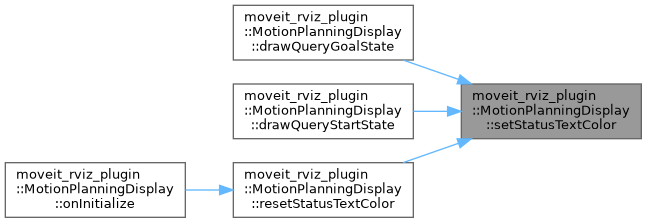
| void | setStatusTextColor (const QColor &color) |
| void | resetStatusTextColor () |
| void | toggleSelectPlanningGroupSubscription (bool enable) |
 Public Member Functions inherited from moveit_rviz_plugin::PlanningSceneDisplay Public Member Functions inherited from moveit_rviz_plugin::PlanningSceneDisplay | |
| PlanningSceneDisplay (bool listen_to_planning_scene=true, bool show_scene_robot=true) | |
| ~PlanningSceneDisplay () override | |
| void | load (const rviz_common::Config &config) override |
| void | save (rviz_common::Config config) const override |
| void | update (float wall_dt, float ros_dt) override |
| void | reset () override |
| void | setLinkColor (const std::string &link_name, const QColor &color) |
| void | unsetLinkColor (const std::string &link_name) |
| void | queueRenderSceneGeometry () |
| void | addBackgroundJob (const std::function< void()> &job, const std::string &name) |
| void | spawnBackgroundJob (const std::function< void()> &job) |
| void | addMainLoopJob (const std::function< void()> &job) |
| queue the execution of this function for the next time the main update() loop gets called | |
| void | waitForAllMainLoopJobs () |
| void | clearJobs () |
| remove all queued jobs | |
| const std::string | getMoveGroupNS () const |
| const moveit::core::RobotModelConstPtr & | getRobotModel () const |
| bool | waitForCurrentRobotState (const rclcpp::Time &t) |
| wait for robot state more recent than t | |
| planning_scene_monitor::LockedPlanningSceneRO | getPlanningSceneRO () const |
| get read-only access to planning scene | |
| planning_scene_monitor::LockedPlanningSceneRW | getPlanningSceneRW () |
| get write access to planning scene | |
| const planning_scene_monitor::PlanningSceneMonitorPtr & | getPlanningSceneMonitor () |
Public Attributes | |
| std::vector< std::shared_ptr< rviz_rendering::Shape > > | place_locations_display_ |
Protected Types | |
| enum | LinkDisplayStatus { COLLISION_LINK , OUTSIDE_BOUNDS_LINK } |
Protected Member Functions | |
| void | clearRobotModel () override |
| void | onRobotModelLoaded () override |
| This is an event called by loadRobotModel() in the MainLoop; do not call directly. | |
| void | onNewPlanningSceneState () override |
| This is called upon successful retrieval of the (initial) planning scene state. | |
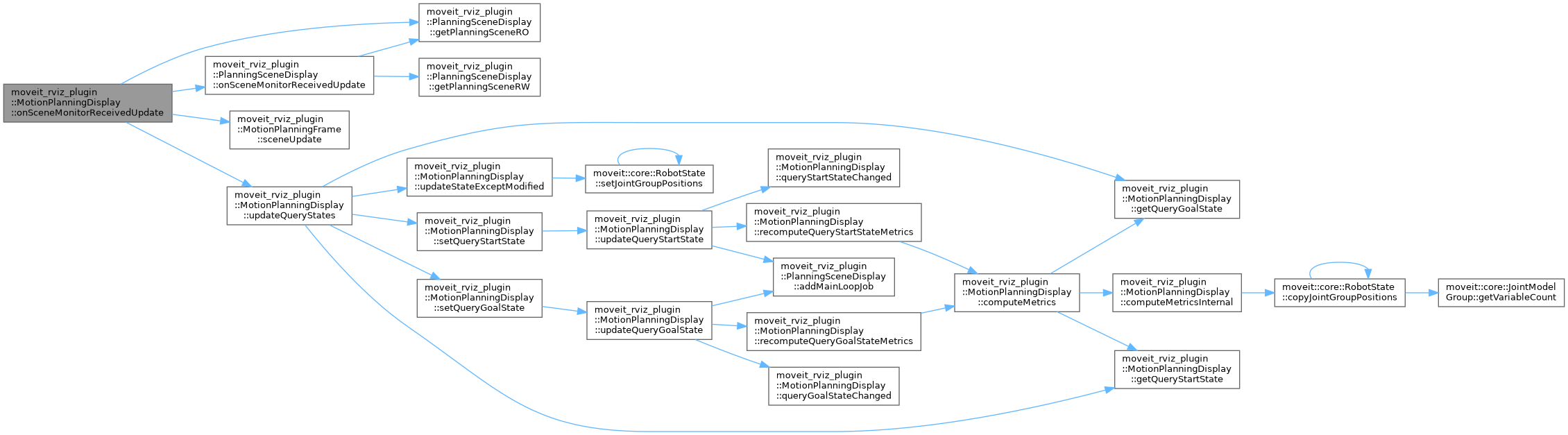
| void | onSceneMonitorReceivedUpdate (planning_scene_monitor::PlanningSceneMonitor::SceneUpdateType update_type) override |
| void | updateInternal (std::chrono::nanoseconds wall_dt, std::chrono::nanoseconds ros_dt) override |
| void | updateInternal (double wall_dt, double ros_dt) override |
| void | renderWorkspaceBox () |
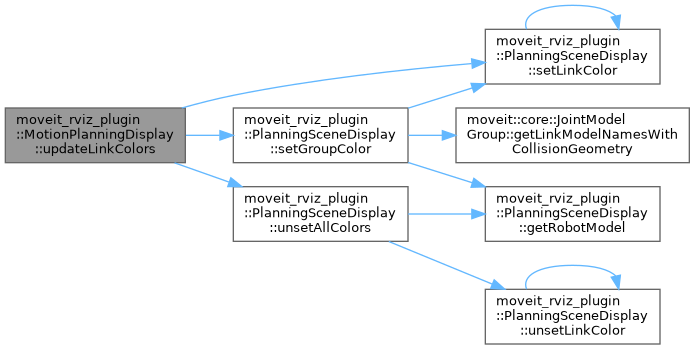
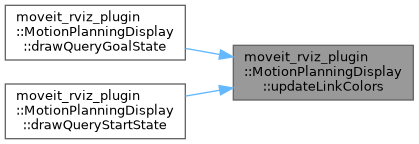
| void | updateLinkColors () |
| void | displayTable (const std::map< std::string, double > &values, const Ogre::ColourValue &color, const Ogre::Vector3 &pos, const Ogre::Quaternion &orient) |
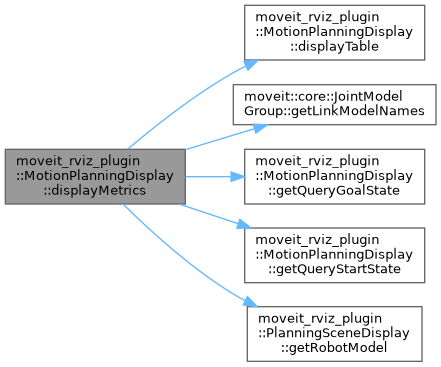
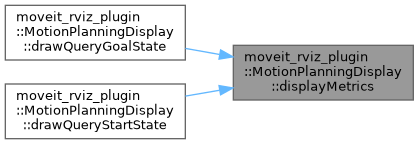
| void | displayMetrics (bool start) |
| void | executeMainLoopJobs () |
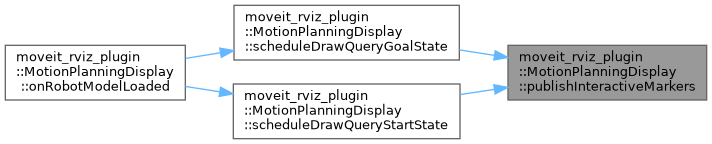
| void | publishInteractiveMarkers (bool pose_update) |
| void | recomputeQueryStartStateMetrics () |
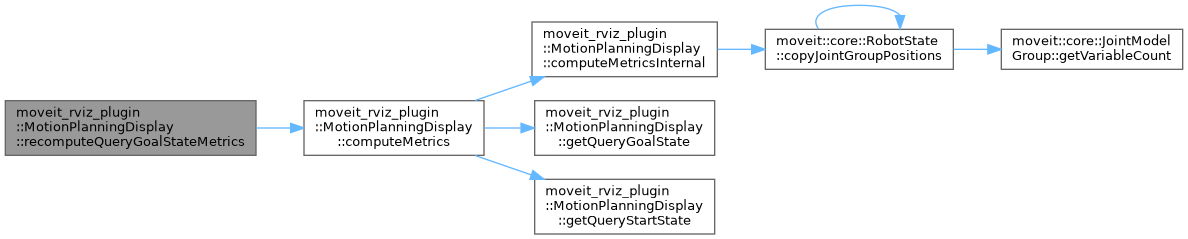
| void | recomputeQueryGoalStateMetrics () |
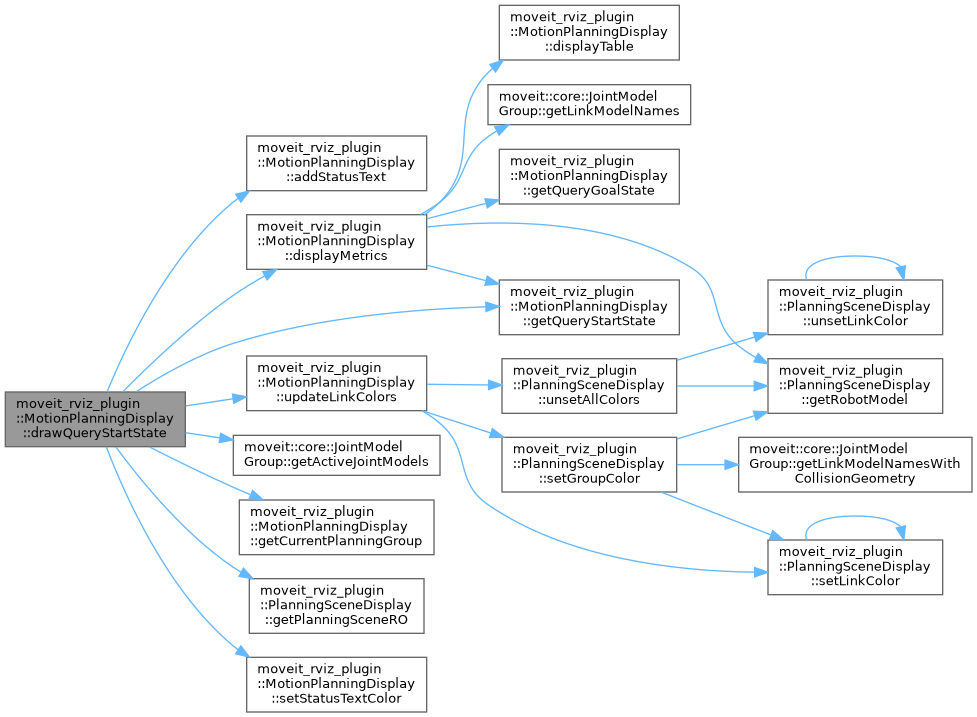
| void | drawQueryStartState () |
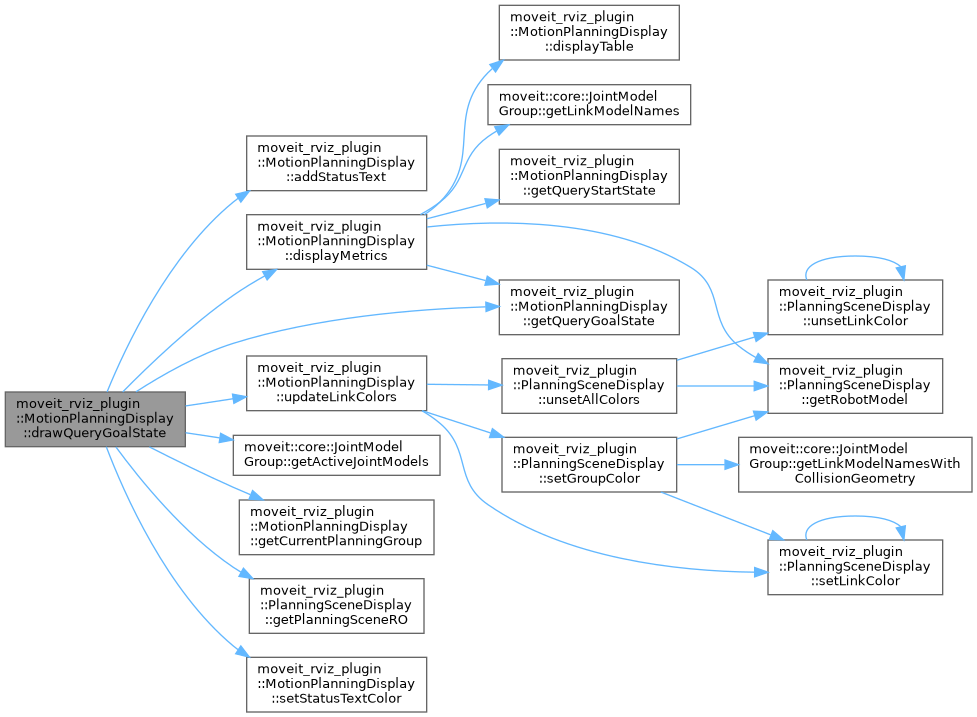
| void | drawQueryGoalState () |
| void | scheduleDrawQueryStartState (robot_interaction::InteractionHandler *handler, bool error_state_changed) |
| void | scheduleDrawQueryGoalState (robot_interaction::InteractionHandler *handler, bool error_state_changed) |
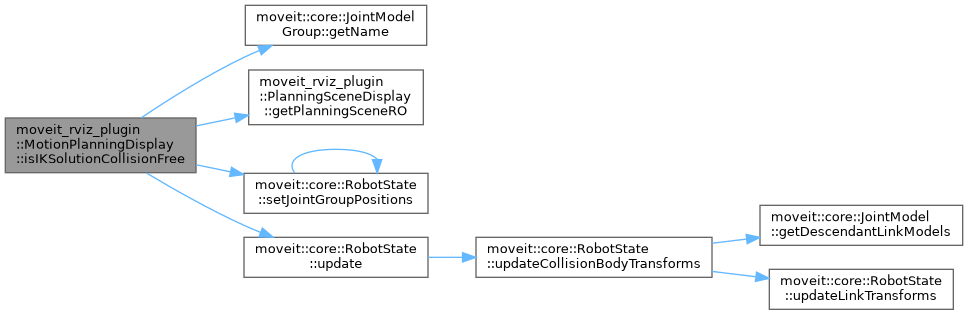
| bool | isIKSolutionCollisionFree (moveit::core::RobotState *state, const moveit::core::JointModelGroup *group, const double *ik_solution) const |
| void | computeMetrics (bool start, const std::string &group, double payload) |
| void | computeMetricsInternal (std::map< std::string, double > &metrics, const robot_interaction::EndEffectorInteraction &eef, const moveit::core::RobotState &state, double payload) |
| void | updateStateExceptModified (moveit::core::RobotState &dest, const moveit::core::RobotState &src) |
| void | updateBackgroundJobProgressBar () |
| void | backgroundJobUpdate (moveit::tools::BackgroundProcessing::JobEvent event, const std::string &jobname) |
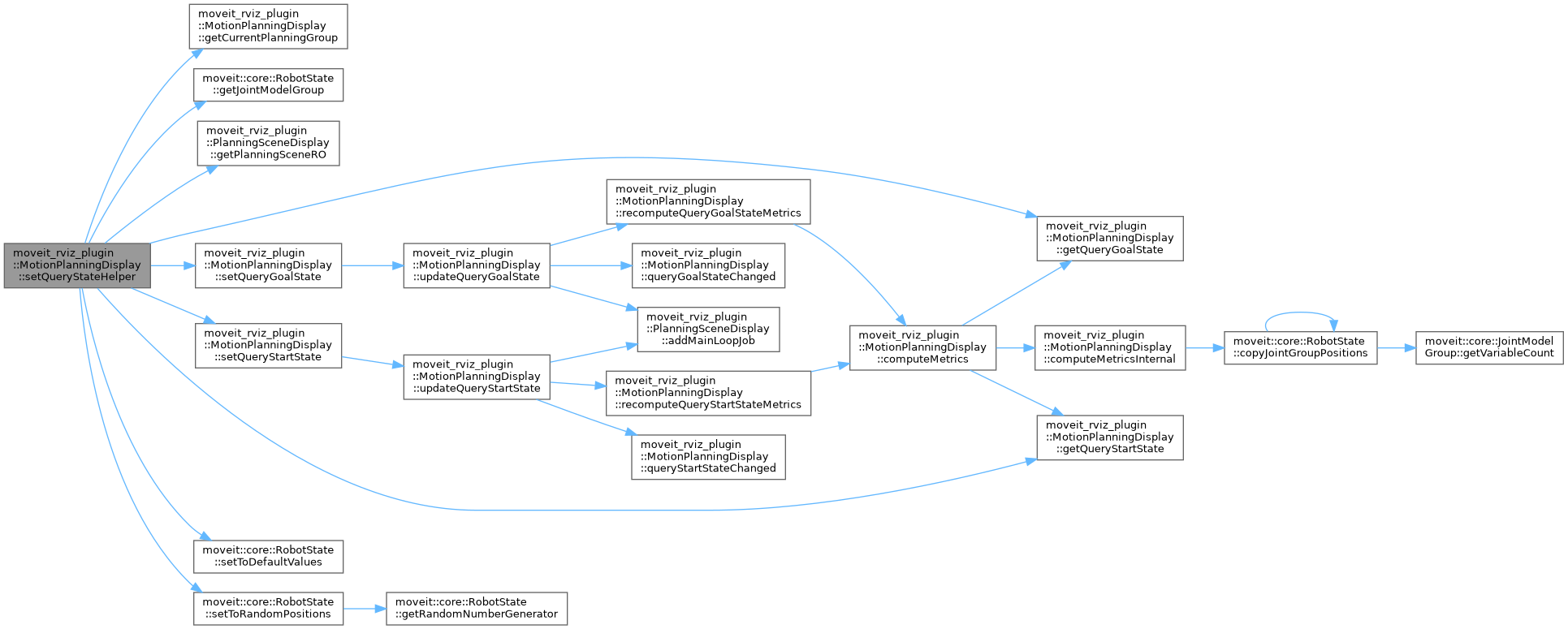
| void | setQueryStateHelper (bool use_start_state, const std::string &v) |
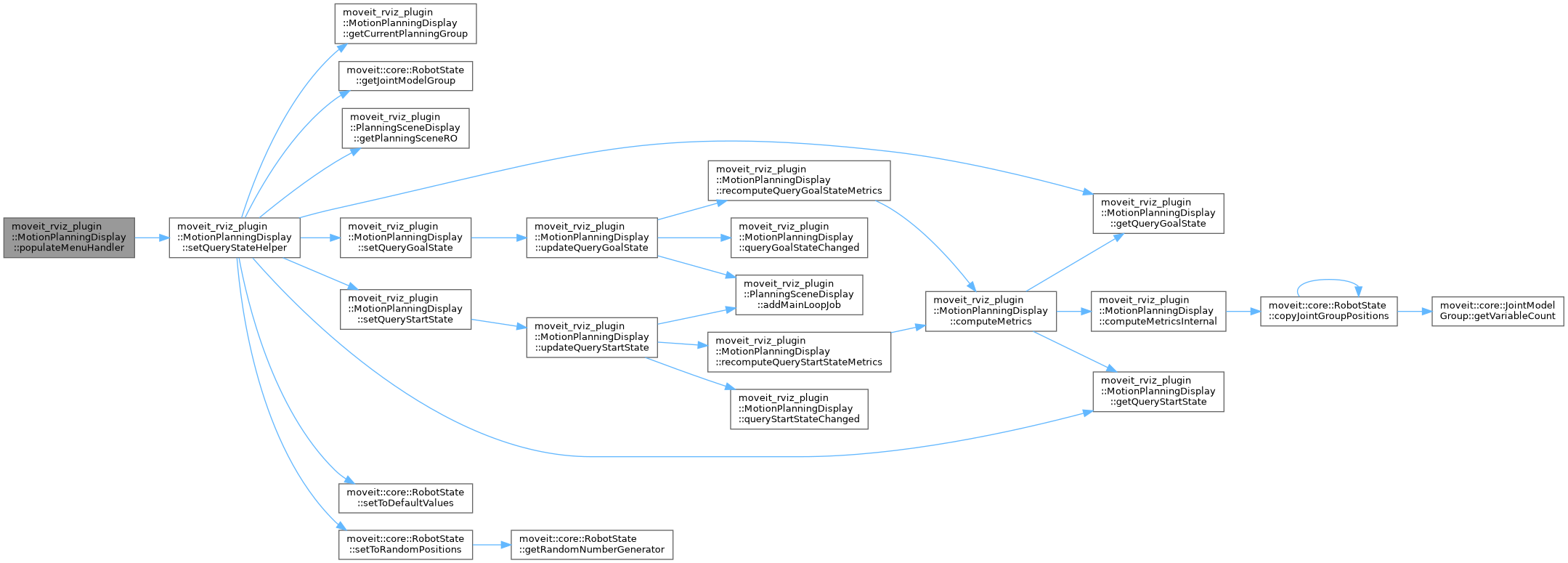
| void | populateMenuHandler (std::shared_ptr< interactive_markers::MenuHandler > &mh) |
| void | selectPlanningGroupCallback (const std_msgs::msg::String::ConstSharedPtr &msg) |
| void | onInitialize () override |
| void | onEnable () override |
| void | onDisable () override |
| void | fixedFrameChanged () override |
| Protected Member Functions inherited from moveit_rviz_plugin::PlanningSceneDisplay | |
| void | loadRobotModel () |
| virtual planning_scene_monitor::PlanningSceneMonitorPtr | createPlanningSceneMonitor () |
| void | calculateOffsetPosition () |
| Set the scene node's position, given the target frame and the planning frame. | |
| void | executeMainLoopJobs () |
| void | sceneMonitorReceivedUpdate (planning_scene_monitor::PlanningSceneMonitor::SceneUpdateType update_type) |
| void | renderPlanningScene () |
| void | setLinkColor (rviz_default_plugins::robot::Robot *robot, const std::string &link_name, const QColor &color) |
| void | unsetLinkColor (rviz_default_plugins::robot::Robot *robot, const std::string &link_name) |
| void | setGroupColor (rviz_default_plugins::robot::Robot *robot, const std::string &group_name, const QColor &color) |
| void | unsetGroupColor (rviz_default_plugins::robot::Robot *robot, const std::string &group_name) |
| void | unsetAllColors (rviz_default_plugins::robot::Robot *robot) |
| void | onInitialize () override |
| void | onEnable () override |
| void | onDisable () override |
| void | fixedFrameChanged () override |
Protected Attributes | |
| RobotStateVisualizationPtr | query_robot_start_ |
| Handles drawing the robot at the start configuration. | |
| RobotStateVisualizationPtr | query_robot_goal_ |
| Handles drawing the robot at the goal configuration. | |
| Ogre::SceneNode * | text_display_scene_node_ |
| displays texts | |
| bool | text_display_for_start_ |
| indicates whether the text display is for the start state or not | |
| rviz_rendering::MovableText * | text_to_display_ |
| rclcpp::Subscription< std_msgs::msg::String >::SharedPtr | planning_group_sub_ |
| std::unique_ptr< rviz_rendering::Shape > | workspace_box_ |
| MotionPlanningFrame * | frame_ |
| rviz_common::PanelDockWidget * | frame_dock_ |
| robot_interaction::RobotInteractionPtr | robot_interaction_ |
| robot_interaction::InteractionHandlerPtr | query_start_state_ |
| robot_interaction::InteractionHandlerPtr | query_goal_state_ |
| std::shared_ptr< interactive_markers::MenuHandler > | menu_handler_start_ |
| std::shared_ptr< interactive_markers::MenuHandler > | menu_handler_goal_ |
| std::map< std::string, LinkDisplayStatus > | status_links_start_ |
| std::map< std::string, LinkDisplayStatus > | status_links_goal_ |
| moveit::core::RobotStatePtr | previous_state_ |
| remember previous start state (updated before starting execution) | |
| std::set< std::string > | modified_groups_ |
| std::map< std::pair< bool, std::string >, std::map< std::string, double > > | computed_metrics_ |
| std::map< std::string, bool > | position_only_ik_ |
| Some groups use position only ik, calls to the metrics have to be modified appropriately. | |
| kinematics_metrics::KinematicsMetricsPtr | kinematics_metrics_ |
| std::map< std::string, dynamics_solver::DynamicsSolverPtr > | dynamics_solver_ |
| std::mutex | update_metrics_lock_ |
| TrajectoryVisualizationPtr | trajectory_visual_ |
| rviz_common::properties::Property * | path_category_ |
| rviz_common::properties::Property * | plan_category_ |
| rviz_common::properties::Property * | metrics_category_ |
| rviz_common::properties::EditableEnumProperty * | planning_group_property_ |
| rviz_common::properties::BoolProperty * | query_start_state_property_ |
| rviz_common::properties::BoolProperty * | query_goal_state_property_ |
| rviz_common::properties::FloatProperty * | query_marker_scale_property_ |
| rviz_common::properties::ColorProperty * | query_start_color_property_ |
| rviz_common::properties::ColorProperty * | query_goal_color_property_ |
| rviz_common::properties::FloatProperty * | query_start_alpha_property_ |
| rviz_common::properties::FloatProperty * | query_goal_alpha_property_ |
| rviz_common::properties::ColorProperty * | query_colliding_link_color_property_ |
| rviz_common::properties::ColorProperty * | query_outside_joint_limits_link_color_property_ |
| rviz_common::properties::BoolProperty * | compute_weight_limit_property_ |
| rviz_common::properties::BoolProperty * | show_manipulability_index_property_ |
| rviz_common::properties::BoolProperty * | show_manipulability_property_ |
| rviz_common::properties::BoolProperty * | show_joint_torques_property_ |
| rviz_common::properties::FloatProperty * | metrics_set_payload_property_ |
| rviz_common::properties::FloatProperty * | metrics_text_height_property_ |
| rviz_common::properties::BoolProperty * | show_workspace_property_ |
| rviz_common::Display * | int_marker_display_ |
| Protected Attributes inherited from moveit_rviz_plugin::PlanningSceneDisplay | |
| planning_scene_monitor::PlanningSceneMonitorPtr | planning_scene_monitor_ |
| std::mutex | robot_model_loading_lock_ |
| moveit::tools::BackgroundProcessing | background_process_ |
| std::deque< std::function< void()> > | main_loop_jobs_ |
| std::mutex | main_loop_jobs_lock_ |
| std::condition_variable | main_loop_jobs_empty_condition_ |
| Ogre::SceneNode * | planning_scene_node_ |
| displays planning scene with everything in it | |
| RobotStateVisualizationPtr | planning_scene_robot_ |
| PlanningSceneRenderPtr | planning_scene_render_ |
| bool | planning_scene_needs_render_ |
| bool | robot_state_needs_render_ |
| double | current_scene_time_ |
| rviz_common::properties::Property * | scene_category_ |
| rviz_common::properties::Property * | robot_category_ |
| rviz_common::properties::StringProperty * | move_group_ns_property_ |
| rviz_common::properties::StringProperty * | robot_description_property_ |
| rviz_common::properties::StringProperty * | scene_name_property_ |
| rviz_common::properties::BoolProperty * | scene_enabled_property_ |
| rviz_common::properties::BoolProperty * | scene_robot_visual_enabled_property_ |
| rviz_common::properties::BoolProperty * | scene_robot_collision_enabled_property_ |
| rviz_common::properties::RosTopicProperty * | planning_scene_topic_property_ |
| rviz_common::properties::FloatProperty * | robot_alpha_property_ |
| rviz_common::properties::FloatProperty * | scene_alpha_property_ |
| rviz_common::properties::ColorProperty * | scene_color_property_ |
| rviz_common::properties::ColorProperty * | attached_body_color_property_ |
| rviz_common::properties::FloatProperty * | scene_display_time_property_ |
| rviz_common::properties::EnumProperty * | octree_render_property_ |
| rviz_common::properties::EnumProperty * | octree_coloring_property_ |
| rclcpp::Node::SharedPtr | node_ |
| rclcpp::Logger | logger_ |
Additional Inherited Members | |
| Protected Slots inherited from moveit_rviz_plugin::PlanningSceneDisplay | |
| virtual void | changedAttachedBodyColor () |
Detailed Description
Definition at line 99 of file motion_planning_display.hpp.
Member Enumeration Documentation
◆ LinkDisplayStatus
|
protected |
| Enumerator | |
|---|---|
| COLLISION_LINK | |
| OUTSIDE_BOUNDS_LINK | |
Definition at line 217 of file motion_planning_display.hpp.
Constructor & Destructor Documentation
◆ MotionPlanningDisplay()
| moveit_rviz_plugin::MotionPlanningDisplay::MotionPlanningDisplay | ( | ) |
Definition at line 82 of file motion_planning_display.cpp.

◆ ~MotionPlanningDisplay()
|
override |
Definition at line 191 of file motion_planning_display.cpp.

Member Function Documentation
◆ addStatusText() [1/2]
| void moveit_rviz_plugin::MotionPlanningDisplay::addStatusText | ( | const std::string & | text | ) |
Definition at line 695 of file motion_planning_display.cpp.
◆ addStatusText() [2/2]
| void moveit_rviz_plugin::MotionPlanningDisplay::addStatusText | ( | const std::vector< std::string > & | text | ) |
Definition at line 701 of file motion_planning_display.cpp.

◆ backgroundJobUpdate()
|
protected |
Definition at line 322 of file motion_planning_display.cpp.


◆ changePlanningGroup()
| void moveit_rviz_plugin::MotionPlanningDisplay::changePlanningGroup | ( | const std::string & | group | ) |
Definition at line 1032 of file motion_planning_display.cpp.

◆ clearPlaceLocationsDisplay()
| void moveit_rviz_plugin::MotionPlanningDisplay::clearPlaceLocationsDisplay | ( | ) |
Definition at line 1487 of file motion_planning_display.cpp.

◆ clearRobotModel()
|
overrideprotectedvirtual |
This function is used by loadRobotModel() and should only be called in the MainLoop You probably should not call this function directly
Reimplemented from moveit_rviz_plugin::PlanningSceneDisplay.
Definition at line 1149 of file motion_planning_display.cpp.
◆ computeMetrics()
|
protected |
Definition at line 479 of file motion_planning_display.cpp.

◆ computeMetricsInternal()
|
protected |
Definition at line 496 of file motion_planning_display.cpp.


◆ displayMetrics()
|
protected |
Definition at line 556 of file motion_planning_display.cpp.
◆ displayTable()
|
protected |
Definition at line 430 of file motion_planning_display.cpp.

◆ drawQueryGoalState()
|
protected |
Definition at line 741 of file motion_planning_display.cpp.
◆ drawQueryStartState()
|
protected |
Definition at line 619 of file motion_planning_display.cpp.
◆ dropVisualizedTrajectory()
|
inline |
Definition at line 153 of file motion_planning_display.hpp.
◆ executeMainLoopJobs()
|
protected |
◆ fixedFrameChanged()
|
overrideprotected |
Definition at line 1472 of file motion_planning_display.cpp.

◆ getCurrentPlanningGroup()
| std::string moveit_rviz_plugin::MotionPlanningDisplay::getCurrentPlanningGroup | ( | ) | const |
Definition at line 1077 of file motion_planning_display.cpp.
◆ getPreviousState()
|
inline |
Definition at line 133 of file motion_planning_display.hpp.
◆ getQueryGoalState()
|
inline |
Definition at line 128 of file motion_planning_display.hpp.
◆ getQueryGoalStateHandler()
|
inline |
Definition at line 148 of file motion_planning_display.hpp.
◆ getQueryStartState()
|
inline |
Definition at line 123 of file motion_planning_display.hpp.
◆ getQueryStartStateHandler()
|
inline |
Definition at line 143 of file motion_planning_display.hpp.
◆ getRobotInteraction()
|
inline |
Definition at line 138 of file motion_planning_display.hpp.
◆ isIKSolutionCollisionFree()
|
protected |
Definition at line 977 of file motion_planning_display.cpp.

◆ load()
|
override |
Definition at line 1379 of file motion_planning_display.cpp.

◆ onDisable()
|
overrideprotected |
Definition at line 1319 of file motion_planning_display.cpp.
◆ onEnable()
|
overrideprotected |
Definition at line 1298 of file motion_planning_display.cpp.
◆ onInitialize()
|
overrideprotected |
Definition at line 204 of file motion_planning_display.cpp.
◆ onNewPlanningSceneState()
|
overrideprotectedvirtual |
This is called upon successful retrieval of the (initial) planning scene state.
Reimplemented from moveit_rviz_plugin::PlanningSceneDisplay.
Definition at line 1243 of file motion_planning_display.cpp.
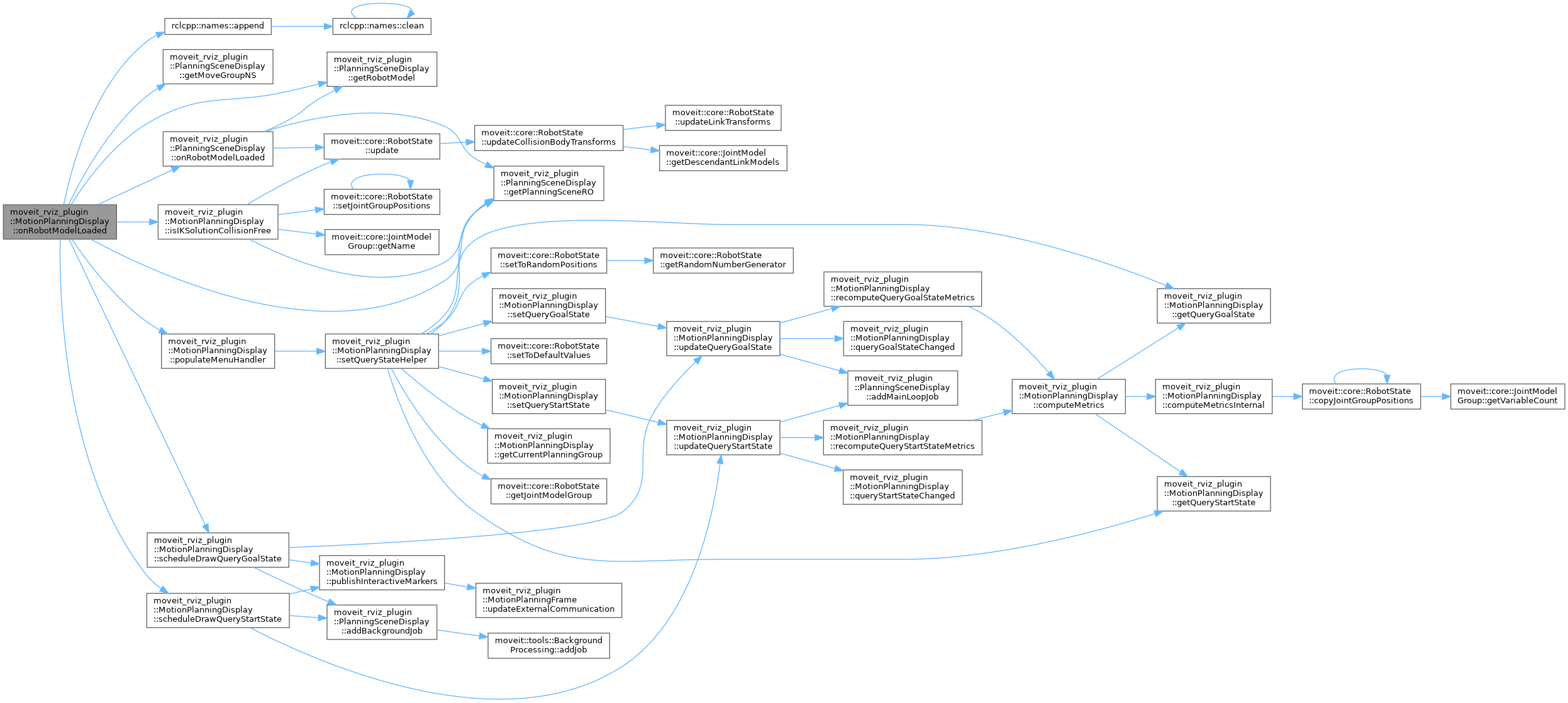
◆ onRobotModelLoaded()
|
overrideprotectedvirtual |
This is an event called by loadRobotModel() in the MainLoop; do not call directly.
Reimplemented from moveit_rviz_plugin::PlanningSceneDisplay.
Definition at line 1166 of file motion_planning_display.cpp.
◆ onSceneMonitorReceivedUpdate()
|
overrideprotectedvirtual |
Reimplemented from moveit_rviz_plugin::PlanningSceneDisplay.
Definition at line 1286 of file motion_planning_display.cpp.
◆ populateMenuHandler()
|
protected |
Definition at line 1117 of file motion_planning_display.cpp.

◆ publishInteractiveMarkers()
|
protected |
Definition at line 815 of file motion_planning_display.cpp.

◆ queryGoalStateChanged
|
signal |

◆ queryStartStateChanged
|
signal |

◆ recomputeQueryGoalStateMetrics()
|
protected |
Definition at line 714 of file motion_planning_display.cpp.

◆ recomputeQueryStartStateMetrics()
|
protected |
Definition at line 707 of file motion_planning_display.cpp.

◆ rememberPreviousStartState()
| void moveit_rviz_plugin::MotionPlanningDisplay::rememberPreviousStartState | ( | ) |
Definition at line 948 of file motion_planning_display.cpp.
◆ renderWorkspaceBox()
|
protected |
Definition at line 456 of file motion_planning_display.cpp.

◆ reset()
|
override |
Definition at line 300 of file motion_planning_display.cpp.
◆ resetStatusTextColor()
| void moveit_rviz_plugin::MotionPlanningDisplay::resetStatusTextColor | ( | ) |
Definition at line 684 of file motion_planning_display.cpp.


◆ save()
|
override |
Definition at line 1442 of file motion_planning_display.cpp.

◆ scheduleDrawQueryGoalState()
|
protected |
Definition at line 922 of file motion_planning_display.cpp.

◆ scheduleDrawQueryStartState()
|
protected |
Definition at line 912 of file motion_planning_display.cpp.

◆ selectPlanningGroupCallback()
|
protected |
Definition at line 294 of file motion_planning_display.cpp.


◆ setQueryGoalState()
| void moveit_rviz_plugin::MotionPlanningDisplay::setQueryGoalState | ( | const moveit::core::RobotState & | goal | ) |
Definition at line 959 of file motion_planning_display.cpp.


◆ setQueryStartState()
| void moveit_rviz_plugin::MotionPlanningDisplay::setQueryStartState | ( | const moveit::core::RobotState & | start | ) |
Definition at line 953 of file motion_planning_display.cpp.


◆ setQueryStateHelper()
|
protected |
Definition at line 1082 of file motion_planning_display.cpp.

◆ setStatusTextColor()
| void moveit_rviz_plugin::MotionPlanningDisplay::setStatusTextColor | ( | const QColor & | color | ) |
Definition at line 689 of file motion_planning_display.cpp.
◆ toggleSelectPlanningGroupSubscription()
| void moveit_rviz_plugin::MotionPlanningDisplay::toggleSelectPlanningGroupSubscription | ( | bool | enable | ) |
Definition at line 280 of file motion_planning_display.cpp.

◆ update()
|
override |
Definition at line 1353 of file motion_planning_display.cpp.
◆ updateBackgroundJobProgressBar()
|
protected |
Definition at line 328 of file motion_planning_display.cpp.


◆ updateInternal() [1/2]
|
overrideprotectedvirtual |
Reimplemented from moveit_rviz_plugin::PlanningSceneDisplay.
Definition at line 1374 of file motion_planning_display.cpp.

◆ updateInternal() [2/2]
|
overrideprotectedvirtual |
Reimplemented from moveit_rviz_plugin::PlanningSceneDisplay.
Definition at line 1364 of file motion_planning_display.cpp.


◆ updateLinkColors()
|
protected |
Definition at line 992 of file motion_planning_display.cpp.
◆ updateQueryGoalState()
| void moveit_rviz_plugin::MotionPlanningDisplay::updateQueryGoalState | ( | ) |
Definition at line 940 of file motion_planning_display.cpp.

◆ updateQueryStartState()
| void moveit_rviz_plugin::MotionPlanningDisplay::updateQueryStartState | ( | ) |
Definition at line 932 of file motion_planning_display.cpp.

◆ updateQueryStates()
| void moveit_rviz_plugin::MotionPlanningDisplay::updateQueryStates | ( | const moveit::core::RobotState & | current_state | ) |
Definition at line 1267 of file motion_planning_display.cpp.

◆ updateStateExceptModified()
|
protected |
Definition at line 1248 of file motion_planning_display.cpp.


◆ useApproximateIK()
| void moveit_rviz_plugin::MotionPlanningDisplay::useApproximateIK | ( | bool | flag | ) |
Definition at line 965 of file motion_planning_display.cpp.
◆ visualizePlaceLocations()
| void moveit_rviz_plugin::MotionPlanningDisplay::visualizePlaceLocations | ( | const std::vector< geometry_msgs::msg::PoseStamped > & | place_poses | ) |
Definition at line 1494 of file motion_planning_display.cpp.

Member Data Documentation
◆ compute_weight_limit_property_
|
protected |
Definition at line 337 of file motion_planning_display.hpp.
◆ computed_metrics_
|
protected |
The metrics are pairs of name-value for each of the active end effectors, for both start & goal states. computed_metrics_[std::make_pair(IS_START_STATE, GROUP_NAME)] = a map of key-value pairs
Definition at line 309 of file motion_planning_display.hpp.
◆ dynamics_solver_
|
protected |
Definition at line 315 of file motion_planning_display.hpp.
◆ frame_
|
protected |
Definition at line 289 of file motion_planning_display.hpp.
◆ frame_dock_
|
protected |
Definition at line 290 of file motion_planning_display.hpp.
◆ int_marker_display_
|
protected |
Definition at line 345 of file motion_planning_display.hpp.
◆ kinematics_metrics_
|
protected |
Definition at line 314 of file motion_planning_display.hpp.
◆ menu_handler_goal_
|
protected |
Definition at line 297 of file motion_planning_display.hpp.
◆ menu_handler_start_
|
protected |
Definition at line 296 of file motion_planning_display.hpp.
◆ metrics_category_
|
protected |
Definition at line 324 of file motion_planning_display.hpp.
◆ metrics_set_payload_property_
|
protected |
Definition at line 341 of file motion_planning_display.hpp.
◆ metrics_text_height_property_
|
protected |
Definition at line 342 of file motion_planning_display.hpp.
◆ modified_groups_
|
protected |
Hold the names of the groups for which the query states have been updated (and should not be altered when new info is received from the planning scene)
Definition at line 305 of file motion_planning_display.hpp.
◆ path_category_
|
protected |
Definition at line 322 of file motion_planning_display.hpp.
◆ place_locations_display_
| std::vector<std::shared_ptr<rviz_rendering::Shape> > moveit_rviz_plugin::MotionPlanningDisplay::place_locations_display_ |
Definition at line 171 of file motion_planning_display.hpp.
◆ plan_category_
|
protected |
Definition at line 323 of file motion_planning_display.hpp.
◆ planning_group_property_
|
protected |
Definition at line 326 of file motion_planning_display.hpp.
◆ planning_group_sub_
|
protected |
Definition at line 283 of file motion_planning_display.hpp.
◆ position_only_ik_
|
protected |
Some groups use position only ik, calls to the metrics have to be modified appropriately.
Definition at line 311 of file motion_planning_display.hpp.
◆ previous_state_
|
protected |
remember previous start state (updated before starting execution)
Definition at line 301 of file motion_planning_display.hpp.
◆ query_colliding_link_color_property_
|
protected |
Definition at line 334 of file motion_planning_display.hpp.
◆ query_goal_alpha_property_
|
protected |
Definition at line 333 of file motion_planning_display.hpp.
◆ query_goal_color_property_
|
protected |
Definition at line 331 of file motion_planning_display.hpp.
◆ query_goal_state_
|
protected |
Definition at line 295 of file motion_planning_display.hpp.
◆ query_goal_state_property_
|
protected |
Definition at line 328 of file motion_planning_display.hpp.
◆ query_marker_scale_property_
|
protected |
Definition at line 329 of file motion_planning_display.hpp.
◆ query_outside_joint_limits_link_color_property_
|
protected |
Definition at line 335 of file motion_planning_display.hpp.
◆ query_robot_goal_
|
protected |
Handles drawing the robot at the goal configuration.
Definition at line 277 of file motion_planning_display.hpp.
◆ query_robot_start_
|
protected |
Handles drawing the robot at the start configuration.
Definition at line 276 of file motion_planning_display.hpp.
◆ query_start_alpha_property_
|
protected |
Definition at line 332 of file motion_planning_display.hpp.
◆ query_start_color_property_
|
protected |
Definition at line 330 of file motion_planning_display.hpp.
◆ query_start_state_
|
protected |
Definition at line 294 of file motion_planning_display.hpp.
◆ query_start_state_property_
|
protected |
Definition at line 327 of file motion_planning_display.hpp.
◆ robot_interaction_
|
protected |
Definition at line 293 of file motion_planning_display.hpp.
◆ show_joint_torques_property_
|
protected |
Definition at line 340 of file motion_planning_display.hpp.
◆ show_manipulability_index_property_
|
protected |
Definition at line 338 of file motion_planning_display.hpp.
◆ show_manipulability_property_
|
protected |
Definition at line 339 of file motion_planning_display.hpp.
◆ show_workspace_property_
|
protected |
Definition at line 343 of file motion_planning_display.hpp.
◆ status_links_goal_
|
protected |
Definition at line 299 of file motion_planning_display.hpp.
◆ status_links_start_
|
protected |
Definition at line 298 of file motion_planning_display.hpp.
◆ text_display_for_start_
|
protected |
indicates whether the text display is for the start state or not
Definition at line 280 of file motion_planning_display.hpp.
◆ text_display_scene_node_
|
protected |
displays texts
Definition at line 279 of file motion_planning_display.hpp.
◆ text_to_display_
|
protected |
Definition at line 281 of file motion_planning_display.hpp.
◆ trajectory_visual_
|
protected |
Definition at line 319 of file motion_planning_display.hpp.
◆ update_metrics_lock_
|
protected |
Definition at line 316 of file motion_planning_display.hpp.
◆ workspace_box_
|
protected |
Definition at line 286 of file motion_planning_display.hpp.
The documentation for this class was generated from the following files:
- moveit_ros/visualization/motion_planning_rviz_plugin/include/moveit/motion_planning_rviz_plugin/motion_planning_display.hpp
- moveit_ros/visualization/motion_planning_rviz_plugin/src/motion_planning_display.cpp