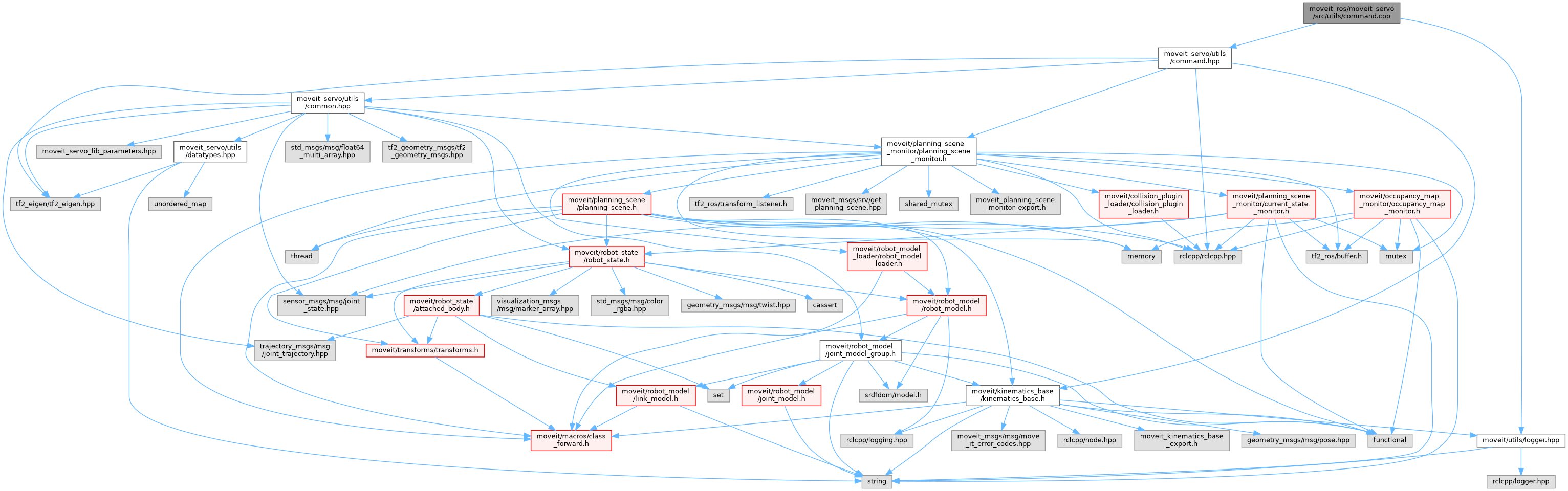
Include dependency graph for command.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit_servo |
Functions | |
| JointDeltaResult | moveit_servo::jointDeltaFromJointJog (const JointJogCommand &command, const moveit::core::RobotStatePtr &robot_state, const servo::Params &servo_params, const JointNameToMoveGroupIndexMap &joint_name_group_index_map) |
| Compute the change in joint position for the given joint jog command. | |
| JointDeltaResult | moveit_servo::jointDeltaFromTwist (const TwistCommand &command, const moveit::core::RobotStatePtr &robot_state, const servo::Params &servo_params, const std::string &planning_frame, const JointNameToMoveGroupIndexMap &joint_name_group_index_map) |
| Compute the change in joint position for the given twist command. | |
| JointDeltaResult | moveit_servo::jointDeltaFromPose (const PoseCommand &command, const moveit::core::RobotStatePtr &robot_state, const servo::Params &servo_params, const std::string &planning_frame, const std::string &ee_frame, const JointNameToMoveGroupIndexMap &joint_name_group_index_map) |
| Compute the change in joint position for the given pose command. | |
| JointDeltaResult | moveit_servo::jointDeltaFromIK (const Eigen::VectorXd &cartesian_position_delta, const moveit::core::RobotStatePtr &robot_state, const servo::Params &servo_params, const JointNameToMoveGroupIndexMap &joint_name_group_index_map) |
| Computes the required change in joint angles for given Cartesian change, using the robot's IK solver. | |