Go to the source code of this file.
|
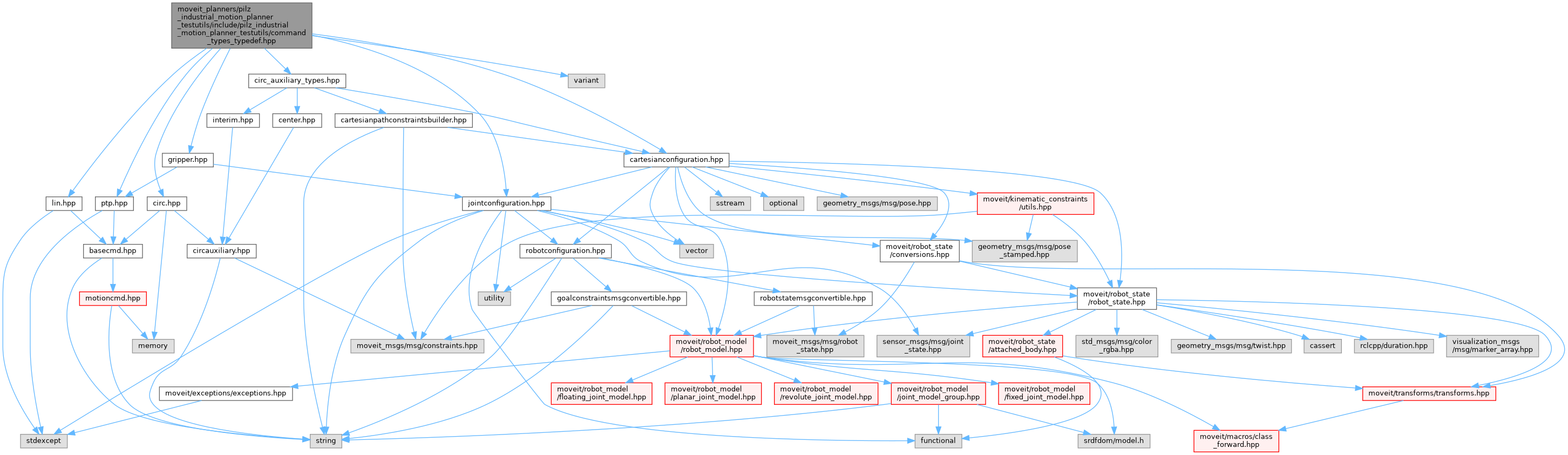
| typedef Ptp< JointConfiguration, JointConfiguration > | pilz_industrial_motion_planner_testutils::PtpJoint |
| |
| typedef Ptp< JointConfiguration, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::PtpJointCart |
| |
| typedef Ptp< CartesianConfiguration, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::PtpCart |
| |
| typedef Lin< JointConfiguration, JointConfiguration > | pilz_industrial_motion_planner_testutils::LinJoint |
| |
| typedef Lin< JointConfiguration, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::LinJointCart |
| |
| typedef Lin< CartesianConfiguration, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::LinCart |
| |
| typedef Circ< CartesianConfiguration, CartesianCenter, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::CircCenterCart |
| |
| typedef Circ< CartesianConfiguration, CartesianInterim, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::CircInterimCart |
| |
| typedef Circ< JointConfiguration, CartesianCenter, JointConfiguration > | pilz_industrial_motion_planner_testutils::CircJointCenterCart |
| |
| typedef Circ< JointConfiguration, CartesianInterim, JointConfiguration > | pilz_industrial_motion_planner_testutils::CircJointInterimCart |
| |
| typedef std::variant< PtpJoint, PtpJointCart, PtpCart, LinJoint, LinCart, CircCenterCart, CircInterimCart, CircJointCenterCart, CircJointInterimCart, Gripper > | pilz_industrial_motion_planner_testutils::CmdVariant |
| |