moveit2
The MoveIt Motion Planning Framework for ROS 2.
Loading...
Searching...
No Matches
moveit_ros
planning
planning_components_tools
src
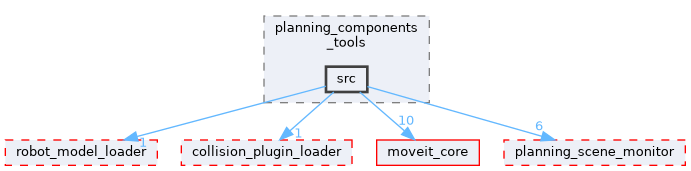
src Directory Reference
Directory dependency graph for src:
Files
compare_collision_speed_checking_fcl_bullet.cpp
display_random_state.cpp
evaluate_collision_checking_speed.cpp
print_planning_model_info.cpp
print_planning_scene_info.cpp
publish_scene_from_text.cpp
visualize_robot_collision_volume.cpp
Generated by
1.9.8