Go to the source code of this file.
|
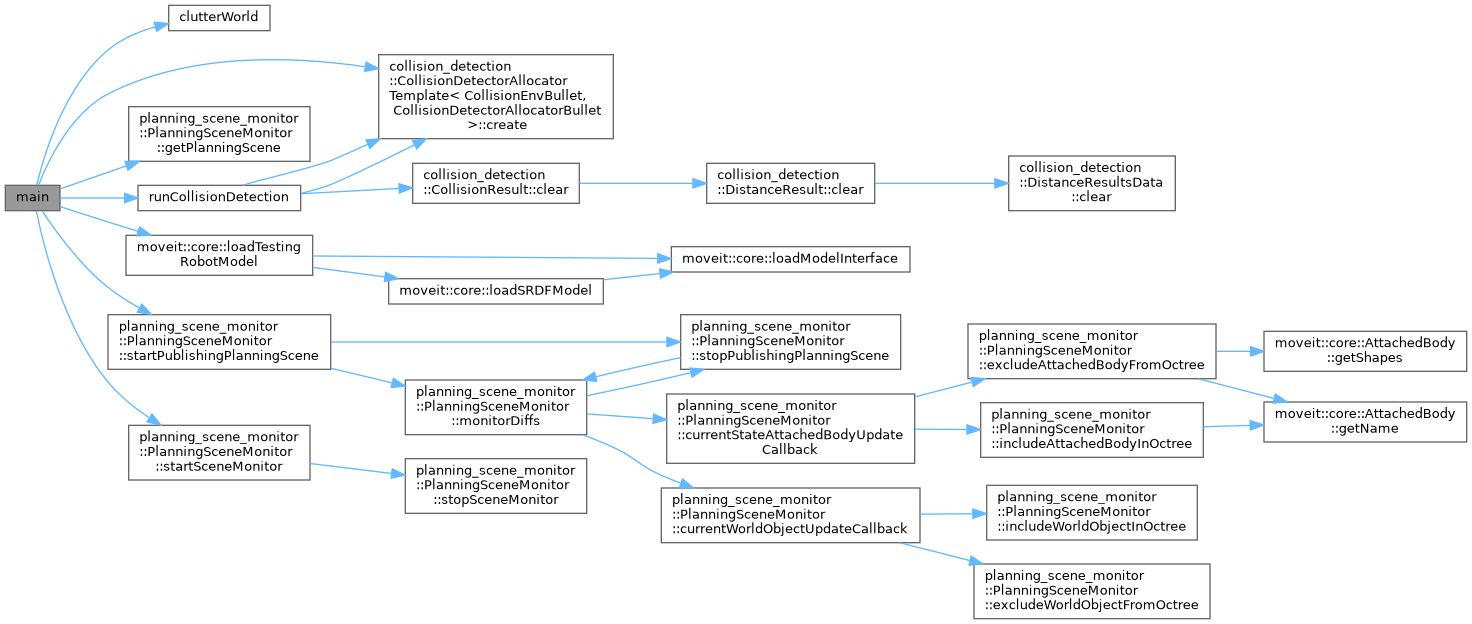
| void | clutterWorld (const planning_scene::PlanningScenePtr &planning_scene, const size_t num_objects, CollisionObjectType type) |
| | Clutters the world of the planning scene with random objects in a certain area around the origin. All added objects are not in collision with the robot.
|
| |
| void | runCollisionDetection (unsigned int trials, const planning_scene::PlanningScenePtr &scene, const std::vector< moveit::core::RobotState > &states, const CollisionDetector col_detector, bool only_self, bool distance=false) |
| | Runs a collision detection benchmark and measures the time.
|
| |
| void | findStates (const RobotStateSelector desired_states, unsigned int num_states, const planning_scene::PlanningScenePtr &scene, std::vector< moveit::core::RobotState > &robot_states) |
| | Samples valid states of the robot which can be in collision if desired.
|
| |
| int | main (int argc, char **argv) |
| |
◆ CollisionDetector
◆ CollisionObjectType
◆ RobotStateSelector
◆ clutterWorld()
| void clutterWorld |
( |
const planning_scene::PlanningScenePtr & |
planning_scene, |
|
|
const size_t |
num_objects, |
|
|
CollisionObjectType |
type |
|
) |
| |
Clutters the world of the planning scene with random objects in a certain area around the origin. All added objects are not in collision with the robot.
- Parameters
-
| planning_scene | The planning scene |
| num_objects | The number of objects to be cluttered |
| CollisionObjectType | Type of object to clutter (mesh or box) |
Definition at line 83 of file compare_collision_speed_checking_fcl_bullet.cpp.
◆ findStates()
Samples valid states of the robot which can be in collision if desired.
- Parameters
-
| desired_states | Specifier for type for desired state |
| num_states | Number of desired states |
| scene | The planning scene |
| robot_states | Result vector |
Definition at line 250 of file compare_collision_speed_checking_fcl_bullet.cpp.
◆ main()
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |
◆ runCollisionDetection()
| void runCollisionDetection |
( |
unsigned int |
trials, |
|
|
const planning_scene::PlanningScenePtr & |
scene, |
|
|
const std::vector< moveit::core::RobotState > & |
states, |
|
|
const CollisionDetector |
col_detector, |
|
|
bool |
only_self, |
|
|
bool |
distance = false |
|
) |
| |
Runs a collision detection benchmark and measures the time.
- Parameters
-
| trials | The number of repeated collision checks for each state |
| scene | The planning scene |
| CollisionDetector | The type of collision detector |
| only_self | Flag for only self collision check performed |
Definition at line 173 of file compare_collision_speed_checking_fcl_bullet.cpp.