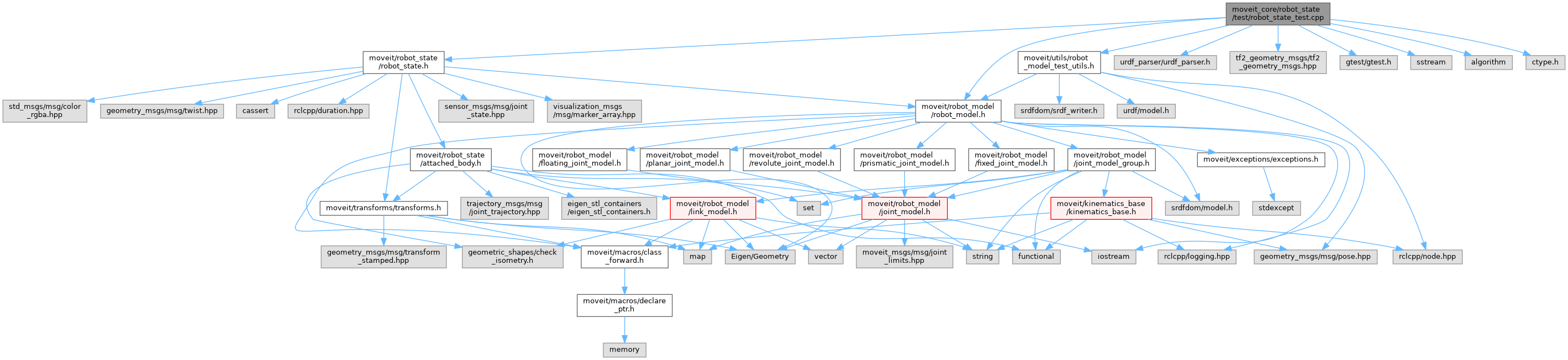
#include <moveit/robot_model/robot_model.hpp>
#include <moveit/robot_state/robot_state.hpp>
#include <moveit/utils/robot_model_test_utils.hpp>
#include <urdf_parser/urdf_parser.h>
#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>
#include <gtest/gtest.h>
#include <gmock/gmock-matchers.h>
#include <sstream>
#include <algorithm>
#include <ctype.h>
Go to the source code of this file.
|
| | TEST (Loading, SimpleRobot) |
| |
| | TEST (LoadingAndFK, SimpleRobot) |
| |
| | TEST_F (OneRobot, setToDefaultValues) |
| |
| | TEST_F (OneRobot, FK) |
| |
| | TEST_F (OneRobot, testPrintCurrentPositionWithJointLimits) |
| |
| | TEST_F (OneRobot, testInterpolation) |
| |
| | TEST_F (OneRobot, rigidlyConnectedParent) |
| |
| | TEST (getJacobian, RevoluteJoints) |
| |
| | TEST (getJacobian, RevoluteJointsButDifferentLink) |
| |
| | TEST (getJacobian, RevoluteAndPrismaticJoints) |
| |
| | TEST (getJacobian, RevoluteAndFixedJoints) |
| |
| | TEST (getJacobian, RevolutePlanarAndPrismaticJoints) |
| |
| | TEST (getJacobian, GroupNotAtOrigin) |
| |
| | TEST (getJointPositions, getFixedJointValue) |
| |
| int | main (int argc, char **argv) |
| |
◆ EXPECT_NEAR_TRACED
| #define EXPECT_NEAR_TRACED |
( |
|
... | ) |
|
Value: { \
SCOPED_TRACE("expect_near(" #__VA_ARGS__ ")"); \
expect_near(__VA_ARGS__); \
}
Definition at line 143 of file robot_state_test.cpp.
◆ main()
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |
◆ TEST() [1/9]
| TEST |
( |
getJacobian |
, |
|
|
GroupNotAtOrigin |
|
|
) |
| |
◆ TEST() [2/9]
| TEST |
( |
getJacobian |
, |
|
|
RevoluteAndFixedJoints |
|
|
) |
| |
◆ TEST() [3/9]
| TEST |
( |
getJacobian |
, |
|
|
RevoluteAndPrismaticJoints |
|
|
) |
| |
◆ TEST() [4/9]
| TEST |
( |
getJacobian |
, |
|
|
RevoluteJoints |
|
|
) |
| |
◆ TEST() [5/9]
| TEST |
( |
getJacobian |
, |
|
|
RevoluteJointsButDifferentLink |
|
|
) |
| |
◆ TEST() [6/9]
| TEST |
( |
getJacobian |
, |
|
|
RevolutePlanarAndPrismaticJoints |
|
|
) |
| |
◆ TEST() [7/9]
| TEST |
( |
getJointPositions |
, |
|
|
getFixedJointValue |
|
|
) |
| |
◆ TEST() [8/9]
◆ TEST() [9/9]
◆ TEST_F() [1/5]
◆ TEST_F() [2/5]
| TEST_F |
( |
OneRobot |
, |
|
|
rigidlyConnectedParent |
|
|
) |
| |
◆ TEST_F() [3/5]
| TEST_F |
( |
OneRobot |
, |
|
|
setToDefaultValues |
|
|
) |
| |
◆ TEST_F() [4/5]
◆ TEST_F() [5/5]
| TEST_F |
( |
OneRobot |
, |
|
|
testPrintCurrentPositionWithJointLimits |
|
|
) |
| |