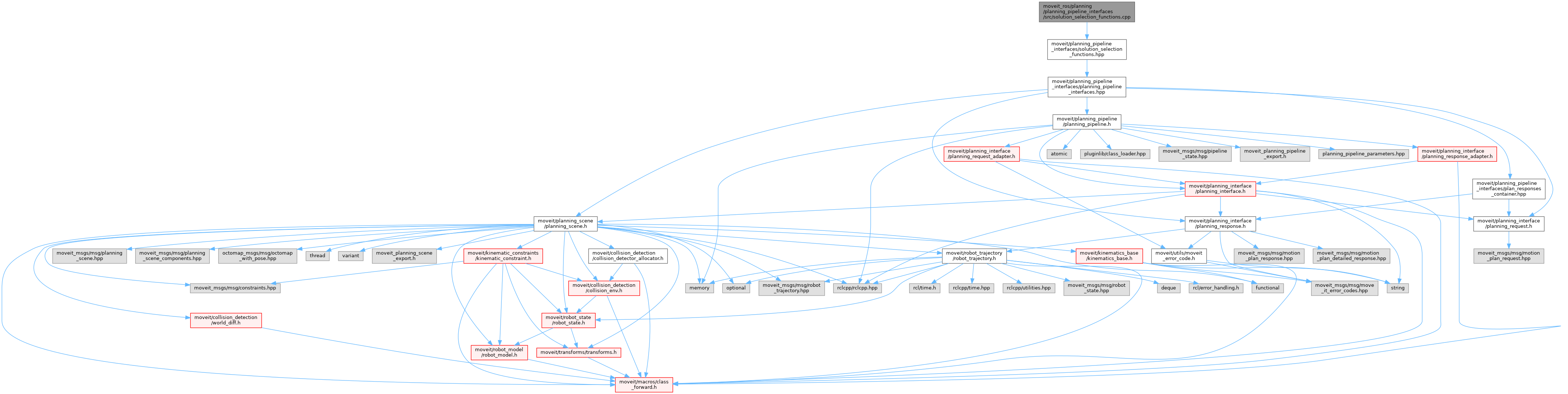
Include dependency graph for solution_selection_functions.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit |
| Main namespace for MoveIt. | |
| namespace | moveit::planning_pipeline_interfaces |
Functions | |
| ::planning_interface::MotionPlanResponse | moveit::planning_pipeline_interfaces::getShortestSolution (const std::vector<::planning_interface::MotionPlanResponse > &solutions) |
| Function that returns the shortest solution out of a vector of solutions based on robot_trajectory::pathLength(...) | |