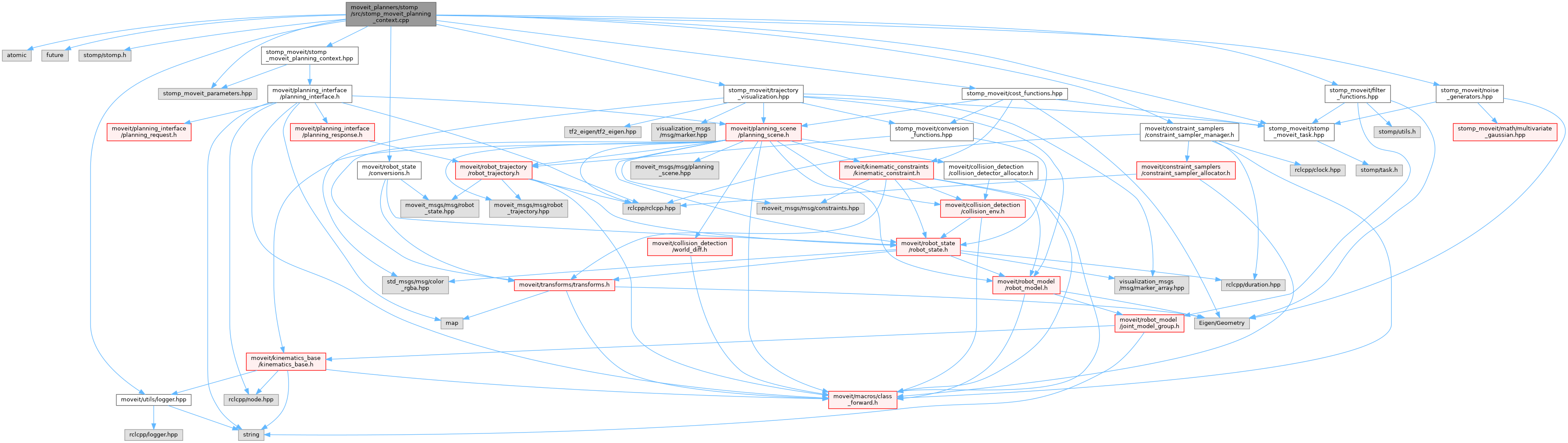
#include <atomic>#include <future>#include <stomp/stomp.h>#include <stomp_moveit/stomp_moveit_planning_context.hpp>#include <stomp_moveit/trajectory_visualization.hpp>#include <stomp_moveit/filter_functions.hpp>#include <stomp_moveit/noise_generators.hpp>#include <stomp_moveit/cost_functions.hpp>#include <stomp_moveit/stomp_moveit_task.hpp>#include <moveit_planners_stomp/stomp_moveit_parameters.hpp>#include <moveit/constraint_samplers/constraint_sampler_manager.hpp>#include <moveit/robot_state/conversions.hpp>#include <moveit/utils/logger.hpp>
Include dependency graph for stomp_moveit_planning_context.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | stomp_moveit |
Functions | |
| bool | stomp_moveit::solveWithStomp (const std::shared_ptr< stomp::Stomp > &stomp, const moveit::core::RobotState &start_state, const moveit::core::RobotState &goal_state, const moveit::core::JointModelGroup *group, const robot_trajectory::RobotTrajectoryPtr &input_trajectory, robot_trajectory::RobotTrajectoryPtr &output_trajectory) |
| bool | stomp_moveit::extractSeedTrajectory (const planning_interface::MotionPlanRequest &req, const moveit::core::RobotModelConstPtr &robot_model, robot_trajectory::RobotTrajectoryPtr &seed) |
| stomp::TaskPtr | stomp_moveit::createStompTask (const stomp::StompConfiguration &config, StompPlanningContext &context) |
| stomp::StompConfiguration | stomp_moveit::getStompConfig (const stomp_moveit::Params ¶ms, size_t num_dimensions) |
Detailed Description
Definition in file stomp_moveit_planning_context.cpp.