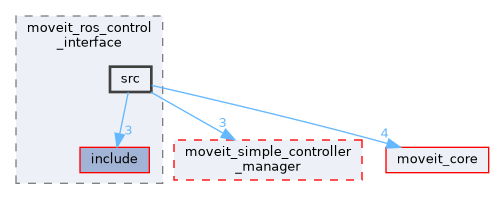
Directory dependency graph for src:
Files | |
| controller_manager_plugin.cpp | |
| empty_controller_plugin.cpp | |
| gripper_command_controller_plugin.cpp | |
| joint_trajectory_controller_plugin.cpp | |
| parallel_gripper_command_controller_plugin.cpp | |
|
moveit2
The MoveIt Motion Planning Framework for ROS 2.
|
Files | |
| controller_manager_plugin.cpp | |
| empty_controller_plugin.cpp | |
| gripper_command_controller_plugin.cpp | |
| joint_trajectory_controller_plugin.cpp | |
| parallel_gripper_command_controller_plugin.cpp | |