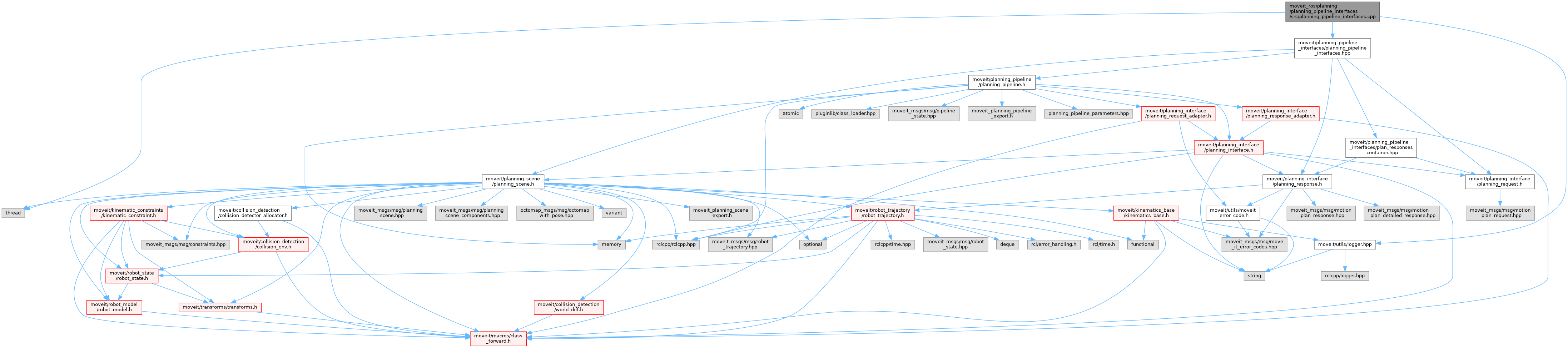
#include <moveit/planning_pipeline_interfaces/planning_pipeline_interfaces.hpp>#include <moveit/utils/logger.hpp>#include <thread>
Include dependency graph for planning_pipeline_interfaces.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit |
| Main namespace for MoveIt. | |
| namespace | moveit::planning_pipeline_interfaces |
Functions | |
| rclcpp::Logger | moveit::planning_pipeline_interfaces::getLogger () |
| ::planning_interface::MotionPlanResponse | moveit::planning_pipeline_interfaces::planWithSinglePipeline (const ::planning_interface::MotionPlanRequest &motion_plan_request, const ::planning_scene::PlanningSceneConstPtr &planning_scene, const std::unordered_map< std::string, planning_pipeline::PlanningPipelinePtr > &planning_pipelines) |
| Function to calculate the MotionPlanResponse for a given MotionPlanRequest and a PlanningScene. | |
| const std::vector<::planning_interface::MotionPlanResponse > | moveit::planning_pipeline_interfaces::planWithParallelPipelines (const std::vector<::planning_interface::MotionPlanRequest > &motion_plan_requests, const ::planning_scene::PlanningSceneConstPtr &planning_scene, const std::unordered_map< std::string, planning_pipeline::PlanningPipelinePtr > &planning_pipelines, const StoppingCriterionFunction &stopping_criterion_callback=nullptr, const SolutionSelectionFunction &solution_selection_function=nullptr) |
| Function to solve multiple planning problems in parallel threads with multiple planning pipelines at the same time. | |
| std::unordered_map< std::string, planning_pipeline::PlanningPipelinePtr > | moveit::planning_pipeline_interfaces::createPlanningPipelineMap (const std::vector< std::string > &pipeline_names, const moveit::core::RobotModelConstPtr &robot_model, const rclcpp::Node::SharedPtr &node, const std::string ¶meter_namespace=std::string()) |
| Utility function to create a map of named planning pipelines. | |