A bounding volume hierarchy (BVH) implementation of a tesseract contact manager. More...
#include <bullet_cast_bvh_manager.h>
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | BulletCastBVHManager ()=default |
| Constructor. More... | |
| ~BulletCastBVHManager () override=default | |
| BulletCastBVHManagerPtr | clone () const |
| Clone the manager. More... | |
| void | setCastCollisionObjectsTransform (const std::string &name, const Eigen::Isometry3d &pose1, const Eigen::Isometry3d &pose2) |
| Set a single cast (moving) collision object's tansforms. More... | |
| void | contactTest (collision_detection::CollisionResult &collisions, const collision_detection::CollisionRequest &req, const collision_detection::AllowedCollisionMatrix *acm, bool self) override |
| Perform a contact test for all objects. More... | |
| void | addCollisionObject (const CollisionObjectWrapperPtr &cow) override |
| Add a tesseract collision object to the manager. More... | |
 Public Member Functions inherited from collision_detection_bullet::BulletBVHManager Public Member Functions inherited from collision_detection_bullet::BulletBVHManager | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | BulletBVHManager () |
| Constructor. More... | |
| virtual | ~BulletBVHManager () |
| BulletBVHManagerPtr | clone () const |
| Clone the manager. More... | |
| bool | hasCollisionObject (const std::string &name) const |
| Find if a collision object already exists. More... | |
| bool | removeCollisionObject (const std::string &name) |
| Remove an object from the checker. More... | |
| bool | enableCollisionObject (const std::string &name) |
| Enable an object. More... | |
| bool | disableCollisionObject (const std::string &name) |
| Disable an object. More... | |
| void | setCollisionObjectsTransform (const std::string &name, const Eigen::Isometry3d &pose) |
| Set a single static collision object's tansform. More... | |
| void | setActiveCollisionObjects (const std::vector< std::string > &names) |
| Set which collision objects are active. More... | |
| const std::vector< std::string > & | getActiveCollisionObjects () const |
| Get which collision objects are active. More... | |
| void | setContactDistanceThreshold (double contact_distance) |
| Set the contact distance threshold for which collision should be considered through expanding the AABB by the contact_distance for all links. More... | |
| double | getContactDistanceThreshold () const |
| Get the contact distance threshold. More... | |
| const std::map< std::string, CollisionObjectWrapperPtr > & | getCollisionObjects () const |
Additional Inherited Members | |
| Protected Attributes inherited from collision_detection_bullet::BulletBVHManager | |
| std::map< std::string, CollisionObjectWrapperPtr > | link2cow_ |
| A map of collision objects being managed. More... | |
| std::vector< std::string > | active_ |
| A list of the active collision links. More... | |
| double | contact_distance_ |
| The contact distance threshold. More... | |
| std::unique_ptr< btCollisionDispatcher > | dispatcher_ |
| The bullet collision dispatcher used for getting object to object collision algorithm. More... | |
| btDispatcherInfo | dispatch_info_ |
| The bullet collision dispatcher configuration information. More... | |
| btDefaultCollisionConfiguration | coll_config_ |
| The bullet collision configuration. More... | |
| std::unique_ptr< btBroadphaseInterface > | broadphase_ |
| The bullet broadphase interface. More... | |
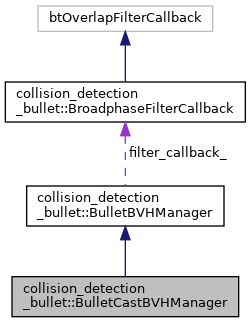
| BroadphaseFilterCallback | filter_callback_ |
| Callback function for culling objects before a broadphase check. More... | |
Detailed Description
A bounding volume hierarchy (BVH) implementation of a tesseract contact manager.
Definition at line 45 of file bullet_cast_bvh_manager.h.
Constructor & Destructor Documentation
◆ BulletCastBVHManager()
|
default |
Constructor.
◆ ~BulletCastBVHManager()
|
overridedefault |
Member Function Documentation
◆ addCollisionObject()
|
overridevirtual |
Add a tesseract collision object to the manager.
- Parameters
-
cow The tesseract bullet collision object
Implements collision_detection_bullet::BulletBVHManager.
Definition at line 152 of file bullet_cast_bvh_manager.cpp.


◆ clone()
| BulletCastBVHManagerPtr collision_detection_bullet::BulletCastBVHManager::clone | ( | ) | const |
Clone the manager.
This is to be used for multi threaded applications. A user should make a clone for each thread.
Definition at line 45 of file bullet_cast_bvh_manager.cpp.
◆ contactTest()
|
overridevirtual |
Perform a contact test for all objects.
- Parameters
-
collisions The Contact results data req The collision request data acm The allowed collision matrix
Implements collision_detection_bullet::BulletBVHManager.
Definition at line 137 of file bullet_cast_bvh_manager.cpp.

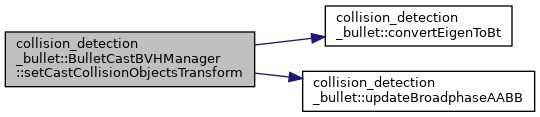
◆ setCastCollisionObjectsTransform()
| void collision_detection_bullet::BulletCastBVHManager::setCastCollisionObjectsTransform | ( | const std::string & | name, |
| const Eigen::Isometry3d & | pose1, | ||
| const Eigen::Isometry3d & | pose2 | ||
| ) |
Set a single cast (moving) collision object's tansforms.
This should only be used for moving objects.
- Parameters
-
name The name of the object pose1 The start transformation in world pose2 The end transformation in world
Definition at line 67 of file bullet_cast_bvh_manager.cpp.

The documentation for this class was generated from the following files:
- moveit_core/collision_detection_bullet/include/moveit/collision_detection_bullet/bullet_integration/bullet_cast_bvh_manager.h
- moveit_core/collision_detection_bullet/src/bullet_integration/bullet_cast_bvh_manager.cpp